 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBEATLE -- Self-Reconfigurable Aerial Robot: Design, Control and Experimental Validation
Apr 14, 2024Modular self-reconfigurable robots (MSRRs) offer enhanced task flexibility by constructing various structures suitable for each task. However, conventional terrestrial MSRRs equipped with wheels face critical challenges, including limitations in the size of constructible structures and system robustness due to elevated wrench loads applied to each module. In this work, we introduce an Aerial MSRR (A-MSRR) system named BEATLE, capable of merging and separating in-flight. BEATLE can merge without applying wrench loads to adjacent modules, thereby expanding the scalability and robustness of conventional terrestrial MSRRs. In this article, we propose a system configuration for BEATLE, including mechanical design, a control framework for multi-connected flight, and a motion planner for reconfiguration motion. The design of a docking mechanism and housing structure aims to balance the durability of the constructed structure with ease of separation. Furthermore, the proposed flight control framework achieves stable multi-connected flight based on contact wrench control. Moreover, the proposed motion planner based on a finite state machine (FSM) achieves precise and robust reconfiguration motion. We also introduce the actual implementation of the prototype and validate the robustness and scalability of the proposed system design through experiments and simulation studies.
Design and Control of Delta: Deformable Multilinked Multirotor with Rolling Locomotion Ability in Terrestrial Domain
Mar 11, 2024



In recent years, multiple types of locomotion methods for robots have been developed and enabled to adapt to multiple domains. In particular, aerial robots are useful for exploration in several situations, taking advantage of its three-dimensional mobility. Moreover, some aerial robots have achieved manipulation tasks in the air. However, energy consumption for flight is large and thus locomotion ability on the ground is also necessary for aerial robots to do tasks for long time. Therefore, in this work, we aim to develop deformable multirotor robot capable of rolling movement with its entire body and achieve motions on the ground and in the air. In this paper, we first describe the design methodology of a deformable multilinked air-ground hybrid multirotor. We also introduce its mechanical design and rotor configuration based on control stability. Then, thrust control method for locomotion in air and ground domains is described. Finally, we show the implemented prototype of the proposed robot and evaluate through experiments in air and terrestrial domains. To the best of our knowledge, this is the first time to achieve the rolling locomotion by multilink structured mutltrotor.
Design and Control of a Humanoid Equipped with Flight Unit and Wheels for Multimodal Locomotion
Mar 26, 2023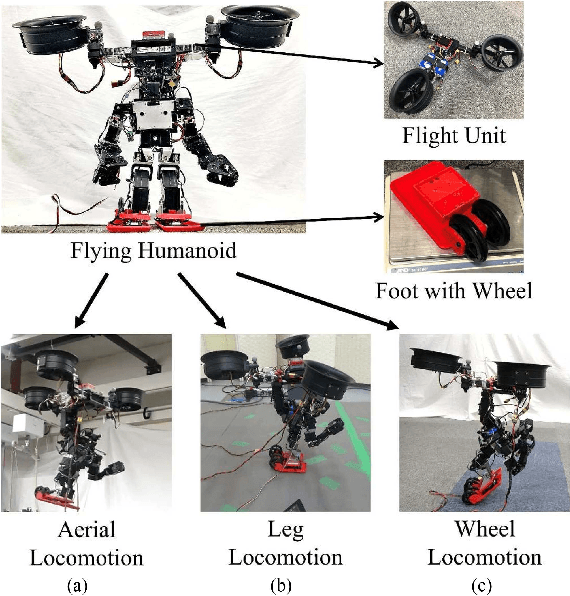
Humanoids are versatile robotic platforms because of their limbs with multiple degrees of freedom. Although humanoids can walk like humans, the speed is relatively slow, and they cannot run over large barriers. To address these problems, we aim to achieve rapid terrestrial locomotion ability and simultaneously expand the domain of locomotion to the air by utilizing thrust for propulsion. In this paper, we first describe an optimized construction method of a humanoid robot equipped with wheels and a flight unit to achieve these abilities. Then, we describe the integrated control framework of the proposed flying humanoid for each mode of locomotion: aerial locomotion, leg locomotion, and wheel locomotion. Finally, we achieved multimodal locomotion and aerial manipulation experiments using the robot platform proposed in this work. To the best of our knowledge, it is the first time to achieve three different types of locomotion, including flight, by a single humanoid.
Design, Control, and Motion Strategy of TRADY: Tilted-Rotor-Equipped Aerial Robot With Autonomous In-flight Assembly and Disassembly Ability
Mar 14, 2023In previous research, various types of aerial robots were developed to improve maneuverability or manipulation abilities. However, there was a challenge in achieving both mobility and manipulation capabilities simultaneously. This is because aerial robots with high mobility lack the necessary rotors to perform manipulation tasks, while those with manipulation ability are too large to achieve high mobility. To address this issue, a new aerial robot called TRADY was introduced in this article. TRADY is a tilted-rotor-equipped aerial robot that can autonomously assemble and disassemble in-flight, allowing for a switch in control model between under-actuated and fully-actuated models. The system features a novel docking mechanism and optimized rotor configuration, as well as a control system that can transition between under-actuated and fully-actuated modes and compensate for discrete changes. Additionally, a new motion strategy for assembly/disassembly motion that includes recovery behavior from hazardous conditions was introduced. Experimental results showed that TRADY can successfully execute aerial assembly/disassembly motions with a 90% success rate and generate more than nine times the torque of a single unit in the assembly state. This is the first robot system capable of performing both assembly and disassembly while seamlessly transitioning between fully-actuated and under-actuated models.
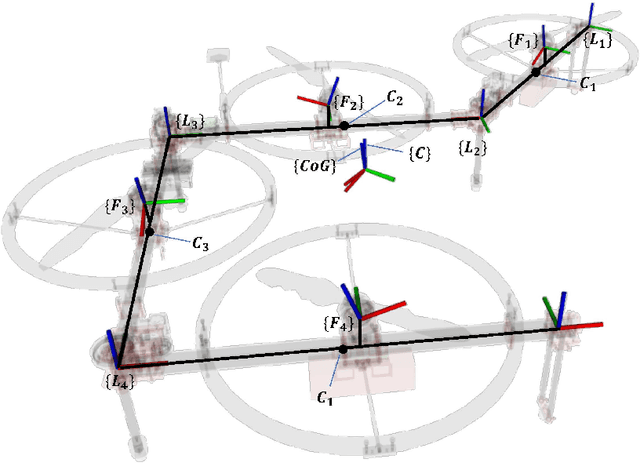
Design, Modeling and Control of a Quadruped Robot SPIDAR: Spherically Vectorable and Distributed Rotors Assisted Air-Ground Amphibious Quadruped Robot
Jan 10, 2023
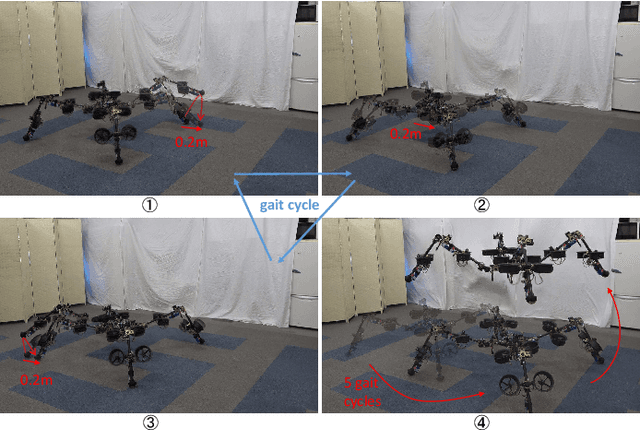


Multimodal locomotion capability is an emerging topic in robotics field, and various novel mobile robots have been developed to enable the maneuvering in both terrestrial and aerial domains. Among these hybrid robots, several state-of-the-art bipedal \robots enable the complex walking motion which is interlaced with flying. These robots are also desired to have the manipulation ability; however, it is difficult for the current forms to keep stability with the joint motion in midair due to the central\ized rotor arrangement. Therefore, in this work, we develop a novel air-ground amphibious quadruped robot called SPIDAR which is assisted by spherically vectorable rotors distributed in each link to enable both walking motion and transformable flight. F\irst, we present a unique mechanical design for quadruped robot that enables terrestrial and aerial locomotion. We then reveal the modeling method for this hybrid robot platform, and further develop an integrated control strategy for both walking and fl\ying with joint motion. Finally, we demonstrate the feasibility of the proposed hybrid quadruped robot by performing a seamless motion that involves static walking and subsequent flight. To the best of our knowledge, this work is the first to achieve a \quadruped robot with multimodal locomotion capability, which also shows the potential of manipulation in multiple domains.
Versatile Multilinked Aerial Robot with Tilting Propellers: Design, Modeling, Control and State Estimation for Autonomous Flight and Manipulation
Aug 12, 2020

Multilinked aerial robot is one of the state-of-the-art works in aerial robotics, which demonstrates the deformability benefiting both maneuvering and manipulation. However, the performance in outdoor physical world has not yet been evaluated because of the weakness in the controllability and the lack of the state estimation for autonomous flight. Thus we adopt tilting propellers to enhance the controllability. The related design, modeling and control method are developed in this work to enable the stable hovering and deformation. Furthermore, the state estimation which involves the time synchronization between sensors and the multilinked kinematics is also presented in this work to enable the fully autonomous flight in the outdoor environment. Various autonomous outdoor experiments, including the fast maneuvering for interception with target, object grasping for delivery, and blanket manipulation for firefighting are performed to evaluate the feasibility and versatility of the proposed robot platform. To the best of our knowledge, this is the first study for the multilinked aerial robot to achieve the fully autonomous flight and the manipulation task in outdoor environment. We also applied our platform in all challenges of the 2020 Mohammed Bin Zayed International Robotics Competition, and ranked third place in Challenge 1 and sixth place in Challenge 3 internationally, demonstrating the reliable flight performance in the fields.