 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexible Morphing Aerial Robot with Inflatable Structure for Perching-based Human-Robot Interaction
Sep 09, 2025

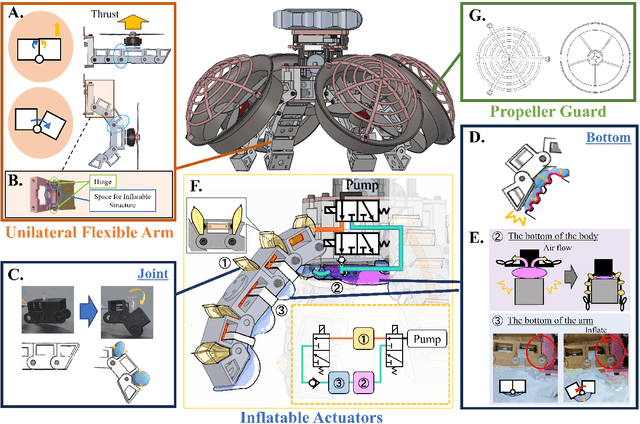

Birds in nature perform perching not only for rest but also for interaction with human such as the relationship with falconers. Recently, researchers achieve perching-capable aerial robots as a way to save energy, and deformable structure demonstrate significant advantages in efficiency of perching and compactness of configuration. However, ensuring flight stability remains challenging for deformable aerial robots due to the difficulty of controlling flexible arms. Furthermore, perching for human interaction requires high compliance along with safety. Thus, this study aims to develop a deformable aerial robot capable of perching on humans with high flexibility and grasping ability. To overcome the challenges of stability of both flight and perching, we propose a hybrid morphing structure that combines a unilateral flexible arm and a pneumatic inflatable actuators. This design allows the robot's arms to remain rigid during flight and soft while perching for more effective grasping. We also develop a pneumatic control system that optimizes pressure regulation while integrating shock absorption and adjustable grasping forces, enhancing interaction capabilities and energy efficiency. Besides, we focus on the structural characteristics of the unilateral flexible arm and identify sufficient conditions under which standard quadrotor modeling and control remain effective in terms of flight stability. Finally, the developed prototype demonstrates the feasibility of compliant perching maneuvers on humans, as well as the robust recovery even after arm deformation caused by thrust reductions during flight. To the best of our knowledge, this work is the first to achieve an aerial robot capable of perching on humans for interaction.
Design and Control of Delta: Deformable Multilinked Multirotor with Rolling Locomotion Ability in Terrestrial Domain
Mar 11, 2024



In recent years, multiple types of locomotion methods for robots have been developed and enabled to adapt to multiple domains. In particular, aerial robots are useful for exploration in several situations, taking advantage of its three-dimensional mobility. Moreover, some aerial robots have achieved manipulation tasks in the air. However, energy consumption for flight is large and thus locomotion ability on the ground is also necessary for aerial robots to do tasks for long time. Therefore, in this work, we aim to develop deformable multirotor robot capable of rolling movement with its entire body and achieve motions on the ground and in the air. In this paper, we first describe the design methodology of a deformable multilinked air-ground hybrid multirotor. We also introduce its mechanical design and rotor configuration based on control stability. Then, thrust control method for locomotion in air and ground domains is described. Finally, we show the implemented prototype of the proposed robot and evaluate through experiments in air and terrestrial domains. To the best of our knowledge, this is the first time to achieve the rolling locomotion by multilink structured mutltrotor.
Design and Control of a Humanoid Equipped with Flight Unit and Wheels for Multimodal Locomotion
Mar 26, 2023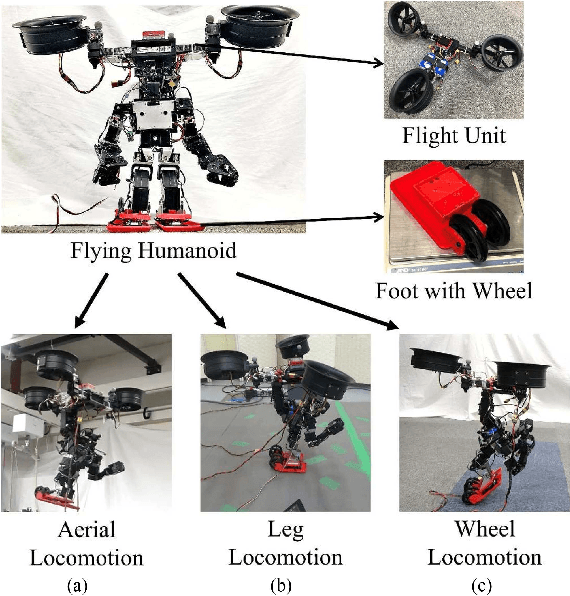
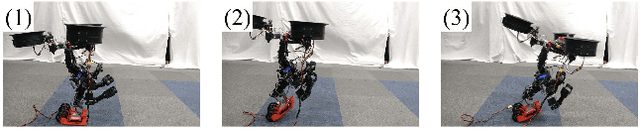
Humanoids are versatile robotic platforms because of their limbs with multiple degrees of freedom. Although humanoids can walk like humans, the speed is relatively slow, and they cannot run over large barriers. To address these problems, we aim to achieve rapid terrestrial locomotion ability and simultaneously expand the domain of locomotion to the air by utilizing thrust for propulsion. In this paper, we first describe an optimized construction method of a humanoid robot equipped with wheels and a flight unit to achieve these abilities. Then, we describe the integrated control framework of the proposed flying humanoid for each mode of locomotion: aerial locomotion, leg locomotion, and wheel locomotion. Finally, we achieved multimodal locomotion and aerial manipulation experiments using the robot platform proposed in this work. To the best of our knowledge, it is the first time to achieve three different types of locomotion, including flight, by a single humanoid.