 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaterialFigBENCH: benchmark dataset with figures for evaluating college-level materials science problem-solving abilities of multimodal large language models
Mar 12, 2026We present MaterialFigBench, a benchmark dataset designed to evaluate the ability of multimodal large language models (LLMs) to solve university-level materials science problems that require accurate interpretation of figures. Unlike existing benchmarks that primarily rely on textual representations, MaterialFigBench focuses on problems in which figures such as phase diagrams, stress-strain curves, Arrhenius plots, diffraction patterns, and microstructural schematics are indispensable for deriving correct answers. The dataset consists of 137 free-response problems adapted from standard materials science textbooks, covering a broad range of topics including crystal structures, mechanical properties, diffusion, phase diagrams, phase transformations, and electronic properties of materials. To address unavoidable ambiguity in reading numerical values from images, expert-defined answer ranges are provided where appropriate. We evaluate several state-of-the-art multimodal LLMs, including ChatGPT and GPT models accessed via OpenAI APIs, and analyze their performance across problem categories and model versions. The results reveal that, although overall accuracy improves with model updates, current LLMs still struggle with genuine visual understanding and quantitative interpretation of materials science figures. In many cases, correct answers are obtained by relying on memorized domain knowledge rather than by reading the provided images. MaterialFigBench highlights persistent weaknesses in visual reasoning, numerical precision, and significant-digit handling, while also identifying problem types where performance has improved. This benchmark provides a systematic and domain-specific foundation for advancing multimodal reasoning capabilities in materials science and for guiding the development of future LLMs with stronger figure-based understanding.
MaterialBENCH: Evaluating College-Level Materials Science Problem-Solving Abilities of Large Language Models
Sep 05, 2024



A college-level benchmark dataset for large language models (LLMs) in the materials science field, MaterialBENCH, is constructed. This dataset consists of problem-answer pairs, based on university textbooks. There are two types of problems: one is the free-response answer type, and the other is the multiple-choice type. Multiple-choice problems are constructed by adding three incorrect answers as choices to a correct answer, so that LLMs can choose one of the four as a response. Most of the problems for free-response answer and multiple-choice types overlap except for the format of the answers. We also conduct experiments using the MaterialBENCH on LLMs, including ChatGPT-3.5, ChatGPT-4, Bard (at the time of the experiments), and GPT-3.5 and GPT-4 with the OpenAI API. The differences and similarities in the performance of LLMs measured by the MaterialBENCH are analyzed and discussed. Performance differences between the free-response type and multiple-choice type in the same models and the influence of using system massages on multiple-choice problems are also studied. We anticipate that MaterialBENCH will encourage further developments of LLMs in reasoning abilities to solve more complicated problems and eventually contribute to materials research and discovery.
Opportunities and challenges of ChatGPT for design knowledge management
Apr 06, 2023


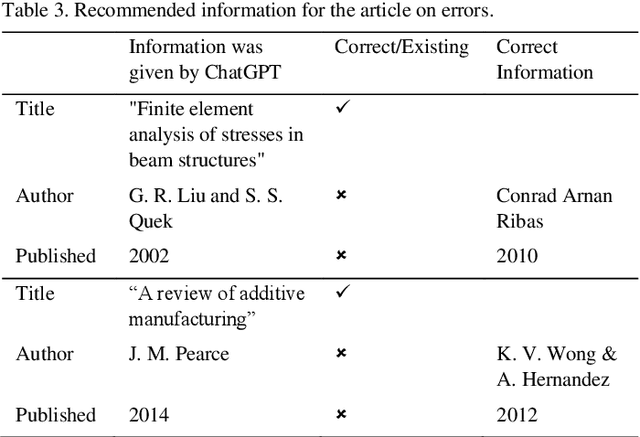
Recent advancements in Natural Language Processing have opened up new possibilities for the development of large language models like ChatGPT, which can facilitate knowledge management in the design process by providing designers with access to a vast array of relevant information. However, integrating ChatGPT into the design process also presents new challenges. In this paper, we provide a concise review of the classification and representation of design knowledge, and past efforts to support designers in acquiring knowledge. We analyze the opportunities and challenges that ChatGPT presents for knowledge management in design and propose promising future research directions. A case study is conducted to validate the advantages and drawbacks of ChatGPT, showing that designers can acquire targeted knowledge from various domains, but the quality of the acquired knowledge is highly dependent on the prompt.
Design, Control, and Motion Strategy of TRADY: Tilted-Rotor-Equipped Aerial Robot With Autonomous In-flight Assembly and Disassembly Ability
Mar 14, 2023In previous research, various types of aerial robots were developed to improve maneuverability or manipulation abilities. However, there was a challenge in achieving both mobility and manipulation capabilities simultaneously. This is because aerial robots with high mobility lack the necessary rotors to perform manipulation tasks, while those with manipulation ability are too large to achieve high mobility. To address this issue, a new aerial robot called TRADY was introduced in this article. TRADY is a tilted-rotor-equipped aerial robot that can autonomously assemble and disassemble in-flight, allowing for a switch in control model between under-actuated and fully-actuated models. The system features a novel docking mechanism and optimized rotor configuration, as well as a control system that can transition between under-actuated and fully-actuated modes and compensate for discrete changes. Additionally, a new motion strategy for assembly/disassembly motion that includes recovery behavior from hazardous conditions was introduced. Experimental results showed that TRADY can successfully execute aerial assembly/disassembly motions with a 90% success rate and generate more than nine times the torque of a single unit in the assembly state. This is the first robot system capable of performing both assembly and disassembly while seamlessly transitioning between fully-actuated and under-actuated models.