 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexible Morphing Aerial Robot with Inflatable Structure for Perching-based Human-Robot Interaction
Sep 09, 2025Birds in nature perform perching not only for rest but also for interaction with human such as the relationship with falconers. Recently, researchers achieve perching-capable aerial robots as a way to save energy, and deformable structure demonstrate significant advantages in efficiency of perching and compactness of configuration. However, ensuring flight stability remains challenging for deformable aerial robots due to the difficulty of controlling flexible arms. Furthermore, perching for human interaction requires high compliance along with safety. Thus, this study aims to develop a deformable aerial robot capable of perching on humans with high flexibility and grasping ability. To overcome the challenges of stability of both flight and perching, we propose a hybrid morphing structure that combines a unilateral flexible arm and a pneumatic inflatable actuators. This design allows the robot's arms to remain rigid during flight and soft while perching for more effective grasping. We also develop a pneumatic control system that optimizes pressure regulation while integrating shock absorption and adjustable grasping forces, enhancing interaction capabilities and energy efficiency. Besides, we focus on the structural characteristics of the unilateral flexible arm and identify sufficient conditions under which standard quadrotor modeling and control remain effective in terms of flight stability. Finally, the developed prototype demonstrates the feasibility of compliant perching maneuvers on humans, as well as the robust recovery even after arm deformation caused by thrust reductions during flight. To the best of our knowledge, this work is the first to achieve an aerial robot capable of perching on humans for interaction.
Hierarchical Language Models for Semantic Navigation and Manipulation in an Aerial-Ground Robotic System
Jun 05, 2025Heterogeneous multi-robot systems show great potential in complex tasks requiring coordinated hybrid cooperation. However, traditional approaches relying on static models often struggle with task diversity and dynamic environments. This highlights the need for generalizable intelligence that can bridge high-level reasoning with low-level execution across heterogeneous agents. To address this, we propose a hierarchical framework integrating a prompted Large Language Model (LLM) and a GridMask-enhanced fine-tuned Vision Language Model (VLM). The LLM performs task decomposition and global semantic map construction, while the VLM extracts task-specified semantic labels and 2D spatial information from aerial images to support local planning. Within this framework, the aerial robot follows a globally optimized semantic path and continuously provides bird-view images, guiding the ground robot's local semantic navigation and manipulation, including target-absent scenarios where implicit alignment is maintained. Experiments on a real-world letter-cubes arrangement task demonstrate the framework's adaptability and robustness in dynamic environments. To the best of our knowledge, this is the first demonstration of an aerial-ground heterogeneous system integrating VLM-based perception with LLM-driven task reasoning and motion planning.
Servo Integrated Nonlinear Model Predictive Control for Overactuated Tiltable-Quadrotors
May 16, 2024


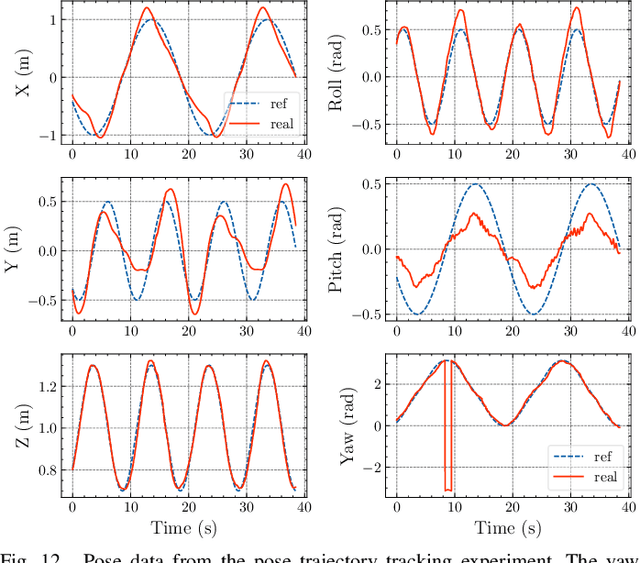
Quadrotors are widely employed across various domains, yet the conventional type faces limitations due to underactuation, where attitude control is closely tied to positional adjustments. In contrast, quadrotors equipped with tiltable rotors offer overactuation, empowering them to track both position and attitude trajectories. However, the nonlinear dynamics of the drone body and the sluggish response of tilting servos pose challenges for conventional cascade controllers. In this study, we propose a control methodology for tilting-rotor quadrotors based on nonlinear model predictive control (NMPC). Unlike conventional approaches, our method preserves the full dynamics without simplification and utilizes actuator commands directly as control inputs. Notably, we incorporate a first-order servo model within the NMPC framework. Through simulation, we observe that integrating the servo dynamics not only enhances control performance but also accelerates convergence. To assess the efficacy of our approach, we fabricate a tiltable-quadrotor and deploy the algorithm onboard at a frequency of 100Hz. Extensive real-world experiments demonstrate rapid, robust, and smooth pose tracking performance.
BEATLE -- Self-Reconfigurable Aerial Robot: Design, Control and Experimental Validation
Apr 14, 2024Modular self-reconfigurable robots (MSRRs) offer enhanced task flexibility by constructing various structures suitable for each task. However, conventional terrestrial MSRRs equipped with wheels face critical challenges, including limitations in the size of constructible structures and system robustness due to elevated wrench loads applied to each module. In this work, we introduce an Aerial MSRR (A-MSRR) system named BEATLE, capable of merging and separating in-flight. BEATLE can merge without applying wrench loads to adjacent modules, thereby expanding the scalability and robustness of conventional terrestrial MSRRs. In this article, we propose a system configuration for BEATLE, including mechanical design, a control framework for multi-connected flight, and a motion planner for reconfiguration motion. The design of a docking mechanism and housing structure aims to balance the durability of the constructed structure with ease of separation. Furthermore, the proposed flight control framework achieves stable multi-connected flight based on contact wrench control. Moreover, the proposed motion planner based on a finite state machine (FSM) achieves precise and robust reconfiguration motion. We also introduce the actual implementation of the prototype and validate the robustness and scalability of the proposed system design through experiments and simulation studies.
Design, Control, and Motion Strategy of TRADY: Tilted-Rotor-Equipped Aerial Robot With Autonomous In-flight Assembly and Disassembly Ability
Mar 14, 2023In previous research, various types of aerial robots were developed to improve maneuverability or manipulation abilities. However, there was a challenge in achieving both mobility and manipulation capabilities simultaneously. This is because aerial robots with high mobility lack the necessary rotors to perform manipulation tasks, while those with manipulation ability are too large to achieve high mobility. To address this issue, a new aerial robot called TRADY was introduced in this article. TRADY is a tilted-rotor-equipped aerial robot that can autonomously assemble and disassemble in-flight, allowing for a switch in control model between under-actuated and fully-actuated models. The system features a novel docking mechanism and optimized rotor configuration, as well as a control system that can transition between under-actuated and fully-actuated modes and compensate for discrete changes. Additionally, a new motion strategy for assembly/disassembly motion that includes recovery behavior from hazardous conditions was introduced. Experimental results showed that TRADY can successfully execute aerial assembly/disassembly motions with a 90% success rate and generate more than nine times the torque of a single unit in the assembly state. This is the first robot system capable of performing both assembly and disassembly while seamlessly transitioning between fully-actuated and under-actuated models.