 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSix-DoF Hand-Based Teleoperation for Omnidirectional Aerial Robots
Jun 17, 2025Omnidirectional aerial robots offer full 6-DoF independent control over position and orientation, making them popular for aerial manipulation. Although advancements in robotic autonomy, operating by human remains essential in complex aerial environments. Existing teleoperation approaches for multirotors fail to fully leverage the additional DoFs provided by omnidirectional rotation. Additionally, the dexterity of human fingers should be exploited for more engaged interaction. In this work, we propose an aerial teleoperation system that brings the omnidirectionality of human hands into the unbounded aerial workspace. Our system includes two motion-tracking marker sets -- one on the shoulder and one on the hand -- along with a data glove to capture hand gestures. Using these inputs, we design four interaction modes for different tasks, including Spherical Mode and Cartesian Mode for long-range moving as well as Operation Mode and Locking Mode for precise manipulation, where the hand gestures are utilized for seamless mode switching. We evaluate our system on a valve-turning task in real world, demonstrating how each mode contributes to effective aerial manipulation. This interaction framework bridges human dexterity with aerial robotics, paving the way for enhanced teleoperated aerial manipulation in unstructured environments.
Hierarchical Language Models for Semantic Navigation and Manipulation in an Aerial-Ground Robotic System
Jun 05, 2025Heterogeneous multi-robot systems show great potential in complex tasks requiring coordinated hybrid cooperation. However, traditional approaches relying on static models often struggle with task diversity and dynamic environments. This highlights the need for generalizable intelligence that can bridge high-level reasoning with low-level execution across heterogeneous agents. To address this, we propose a hierarchical framework integrating a prompted Large Language Model (LLM) and a GridMask-enhanced fine-tuned Vision Language Model (VLM). The LLM performs task decomposition and global semantic map construction, while the VLM extracts task-specified semantic labels and 2D spatial information from aerial images to support local planning. Within this framework, the aerial robot follows a globally optimized semantic path and continuously provides bird-view images, guiding the ground robot's local semantic navigation and manipulation, including target-absent scenarios where implicit alignment is maintained. Experiments on a real-world letter-cubes arrangement task demonstrate the framework's adaptability and robustness in dynamic environments. To the best of our knowledge, this is the first demonstration of an aerial-ground heterogeneous system integrating VLM-based perception with LLM-driven task reasoning and motion planning.
Servo Integrated Nonlinear Model Predictive Control for Overactuated Tiltable-Quadrotors
May 16, 2024


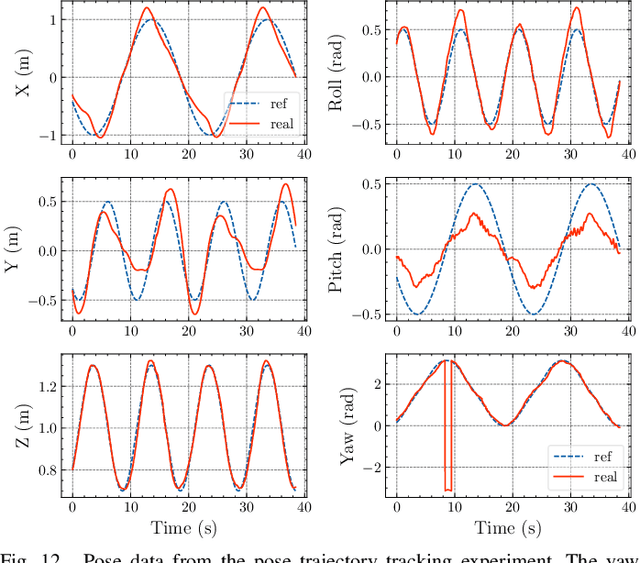
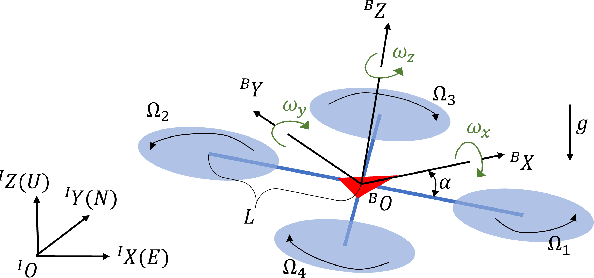
Quadrotors are widely employed across various domains, yet the conventional type faces limitations due to underactuation, where attitude control is closely tied to positional adjustments. In contrast, quadrotors equipped with tiltable rotors offer overactuation, empowering them to track both position and attitude trajectories. However, the nonlinear dynamics of the drone body and the sluggish response of tilting servos pose challenges for conventional cascade controllers. In this study, we propose a control methodology for tilting-rotor quadrotors based on nonlinear model predictive control (NMPC). Unlike conventional approaches, our method preserves the full dynamics without simplification and utilizes actuator commands directly as control inputs. Notably, we incorporate a first-order servo model within the NMPC framework. Through simulation, we observe that integrating the servo dynamics not only enhances control performance but also accelerates convergence. To assess the efficacy of our approach, we fabricate a tiltable-quadrotor and deploy the algorithm onboard at a frequency of 100Hz. Extensive real-world experiments demonstrate rapid, robust, and smooth pose tracking performance.
Learning-Initialized Trajectory Planning in Unknown Environments
Sep 19, 2023Autonomous flight in unknown environments requires precise planning for both the spatial and temporal profiles of trajectories, which generally involves nonconvex optimization, leading to high time costs and susceptibility to local optima. To address these limitations, we introduce the Learning-Initialized Trajectory Planner (LIT-Planner), a novel approach that guides optimization using a Neural Network (NN) Planner to provide initial values. We first leverage the spatial-temporal optimization with batch sampling to generate training cases, aiming to capture multimodality in trajectories. Based on these data, the NN-Planner maps visual and inertial observations to trajectory parameters for handling unknown environments. The network outputs are then optimized to enhance both reliability and explainability, ensuring robust performance. Furthermore, we propose a framework that supports robust online replanning with tolerance to planning latency. Comprehensive simulations validate the LIT-Planner's time efficiency without compromising trajectory quality compared to optimization-based methods. Real-world experiments further demonstrate its practical suitability for autonomous drone navigation.
Potato: A Data-Oriented Programming 3D Simulator for Large-Scale Heterogeneous Swarm Robotics
Aug 24, 2023



Large-scale simulation with realistic nonlinear dynamic models is crucial for algorithms development for swarm robotics. However, existing platforms are mainly developed based on Object-Oriented Programming (OOP) and either use simple kinematic models to pursue a large number of simulating nodes or implement realistic dynamic models with limited simulating nodes. In this paper, we develop a simulator based on Data-Oriented Programming (DOP) that utilizes GPU parallel computing to achieve large-scale swarm robotic simulations. Specifically, we use a multi-process approach to simulate heterogeneous agents and leverage PyTorch with GPU to simulate homogeneous agents with a large number. We test our approach using a nonlinear quadrotor model and demonstrate that this DOP approach can maintain almost the same computational speed when quadrotors are less than 5,000. We also provide two examples to present the functionality of the platform.
Nonlinear MPC for Quadrotors in Close-Proximity Flight with Neural Network Downwash Prediction
Apr 16, 2023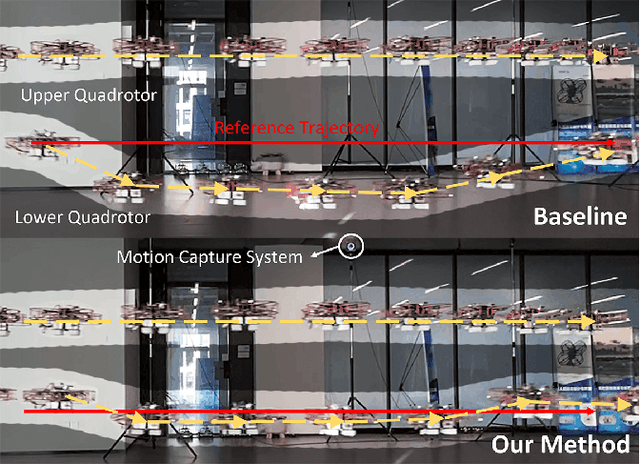
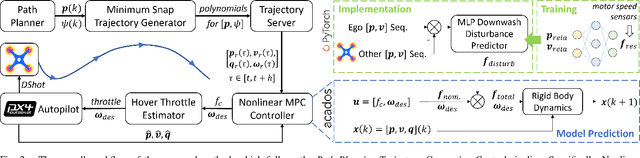
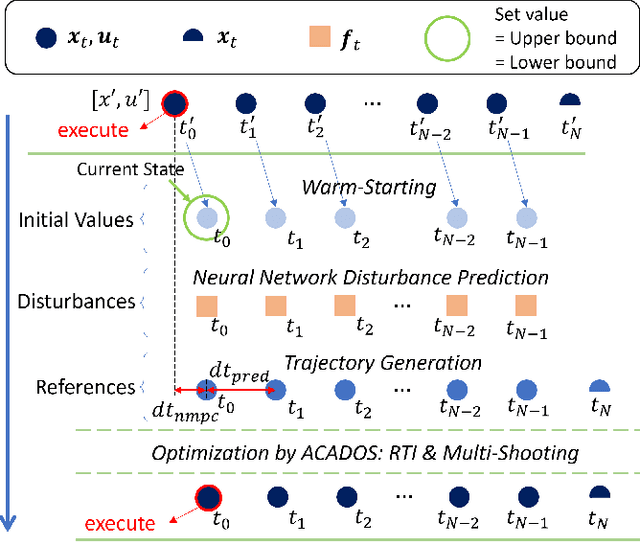
Swarm aerial robots are required to maintain close proximity to successfully traverse narrow areas in cluttered environments. However, this movement is affected by the downwash effect generated by the other quadrotors in the swarm. This aerodynamic effect is highly nonlinear and hard to model by classic mathematical methods. In addition, the motor speeds of quadrotors are risky to reach the limit when resisting the effect. To solve these problems, we integrate a Neural network Downwash Predictor with Nonlinear Model Predictive Control (NDP-NMPC) to propose a trajectory-tracking approach. The network is trained with spectral normalization to ensure robustness and safety on uncollected cases. The predicted disturbances are then incorporated into the optimization scheme in NMPC, which handles constraints to ensure that the motor speed remains within safe limits. We also design a quadrotor system, identify its parameters, and implement the proposed method onboard. Finally, we conduct an open-loop prediction experiment to verify the safety and effectiveness of the network, and a real-time closed-loop trajectory tracking experiment which demonstrates a 75.37% reduction of tracking error in height under the downwash effect.
Indoor Localization for Quadrotors using Invisible Projected Tags
Mar 13, 2022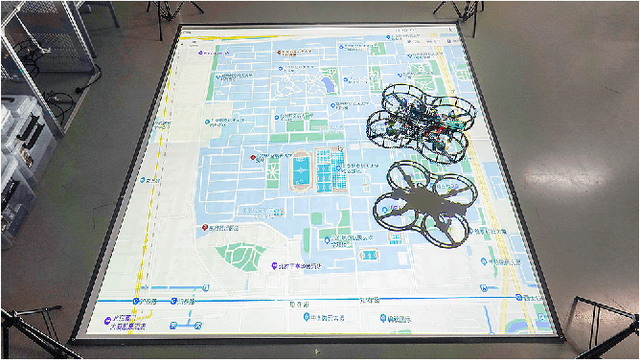
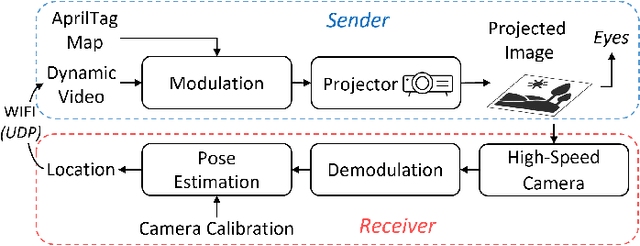
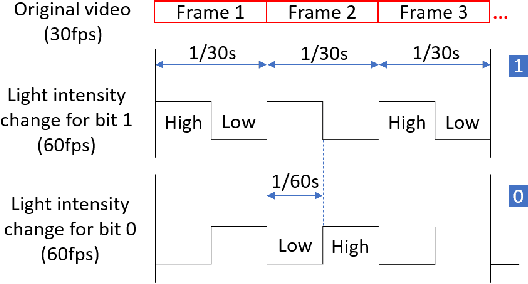
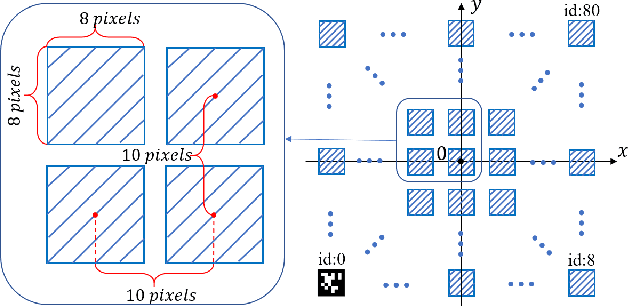
Augmented reality (AR) technology has been introduced into the robotics field to narrow the visual gap between indoor and outdoor environments. However, without signals from satellite navigation systems, flight experiments in these indoor AR scenarios need other accurate localization approaches. This work proposes a real-time centimeter-level indoor localization method based on psycho-visually invisible projected tags (IPT), requiring a projector as the sender and quadrotors with high-speed cameras as the receiver. The method includes a modulation process for the sender, as well as demodulation and pose estimation steps for the receiver, where screen-camera communication technology is applied to hide fiducial tags using human vision property. Experiments have demonstrated that IPT can achieve accuracy within ten centimeters and a speed of about ten FPS. Compared with other localization methods for AR robotics platforms, IPT is affordable by using only a projector and high-speed cameras as hardware consumption and convenient by omitting a coordinate alignment step. To the authors' best knowledge, this is the first time screen-camera communication is utilized for AR robot localization.