 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-Initialized Trajectory Planning in Unknown Environments
Sep 19, 2023Autonomous flight in unknown environments requires precise planning for both the spatial and temporal profiles of trajectories, which generally involves nonconvex optimization, leading to high time costs and susceptibility to local optima. To address these limitations, we introduce the Learning-Initialized Trajectory Planner (LIT-Planner), a novel approach that guides optimization using a Neural Network (NN) Planner to provide initial values. We first leverage the spatial-temporal optimization with batch sampling to generate training cases, aiming to capture multimodality in trajectories. Based on these data, the NN-Planner maps visual and inertial observations to trajectory parameters for handling unknown environments. The network outputs are then optimized to enhance both reliability and explainability, ensuring robust performance. Furthermore, we propose a framework that supports robust online replanning with tolerance to planning latency. Comprehensive simulations validate the LIT-Planner's time efficiency without compromising trajectory quality compared to optimization-based methods. Real-world experiments further demonstrate its practical suitability for autonomous drone navigation.
CAMO-MOT: Combined Appearance-Motion Optimization for 3D Multi-Object Tracking with Camera-LiDAR Fusion
Sep 12, 2022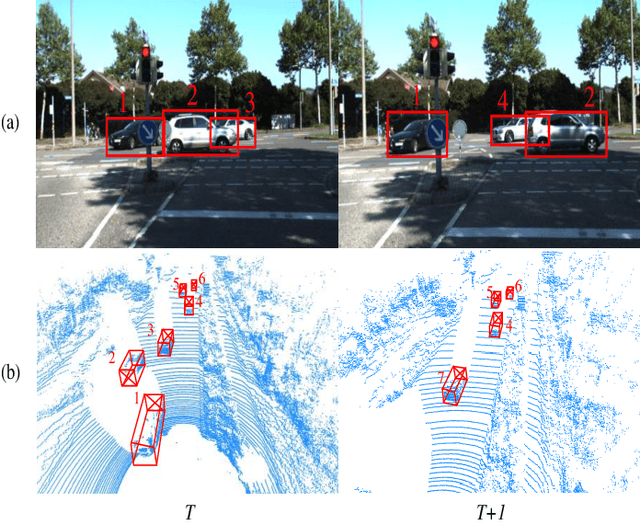
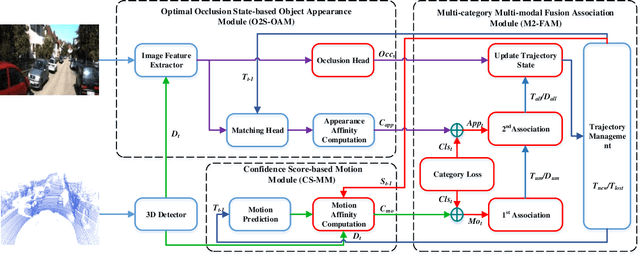
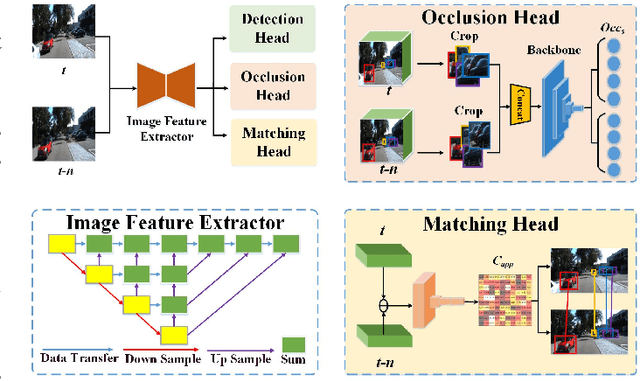
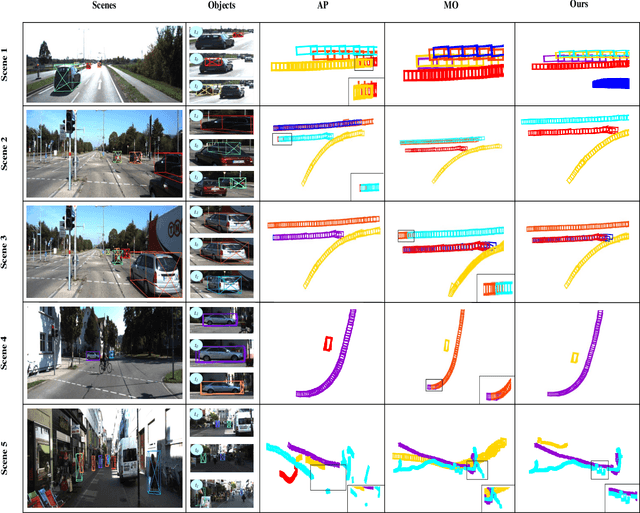
3D Multi-object tracking (MOT) ensures consistency during continuous dynamic detection, conducive to subsequent motion planning and navigation tasks in autonomous driving. However, camera-based methods suffer in the case of occlusions and it can be challenging to accurately track the irregular motion of objects for LiDAR-based methods. Some fusion methods work well but do not consider the untrustworthy issue of appearance features under occlusion. At the same time, the false detection problem also significantly affects tracking. As such, we propose a novel camera-LiDAR fusion 3D MOT framework based on the Combined Appearance-Motion Optimization (CAMO-MOT), which uses both camera and LiDAR data and significantly reduces tracking failures caused by occlusion and false detection. For occlusion problems, we are the first to propose an occlusion head to select the best object appearance features multiple times effectively, reducing the influence of occlusions. To decrease the impact of false detection in tracking, we design a motion cost matrix based on confidence scores which improve the positioning and object prediction accuracy in 3D space. As existing multi-object tracking methods only consider a single category, we also propose to build a multi-category loss to implement multi-object tracking in multi-category scenes. A series of validation experiments are conducted on the KITTI and nuScenes tracking benchmarks. Our proposed method achieves state-of-the-art performance and the lowest identity switches (IDS) value (23 for Car and 137 for Pedestrian) among all multi-modal MOT methods on the KITTI test dataset. And our proposed method achieves state-of-the-art performance among all algorithms on the nuScenes test dataset with 75.3% AMOTA.