 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-Initialized Trajectory Planning in Unknown Environments
Sep 19, 2023Autonomous flight in unknown environments requires precise planning for both the spatial and temporal profiles of trajectories, which generally involves nonconvex optimization, leading to high time costs and susceptibility to local optima. To address these limitations, we introduce the Learning-Initialized Trajectory Planner (LIT-Planner), a novel approach that guides optimization using a Neural Network (NN) Planner to provide initial values. We first leverage the spatial-temporal optimization with batch sampling to generate training cases, aiming to capture multimodality in trajectories. Based on these data, the NN-Planner maps visual and inertial observations to trajectory parameters for handling unknown environments. The network outputs are then optimized to enhance both reliability and explainability, ensuring robust performance. Furthermore, we propose a framework that supports robust online replanning with tolerance to planning latency. Comprehensive simulations validate the LIT-Planner's time efficiency without compromising trajectory quality compared to optimization-based methods. Real-world experiments further demonstrate its practical suitability for autonomous drone navigation.
Nonlinear MPC for Quadrotors in Close-Proximity Flight with Neural Network Downwash Prediction
Apr 16, 2023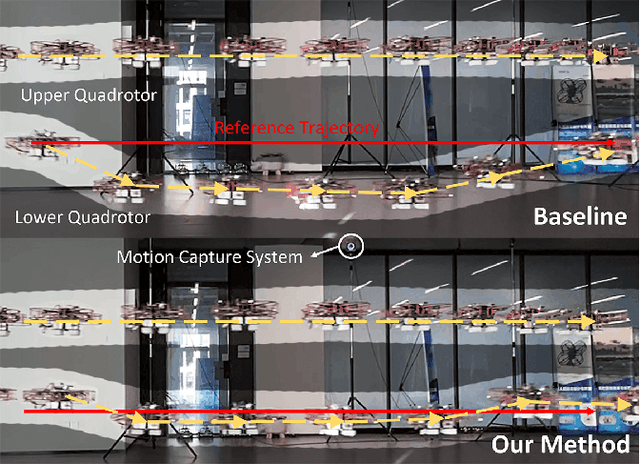
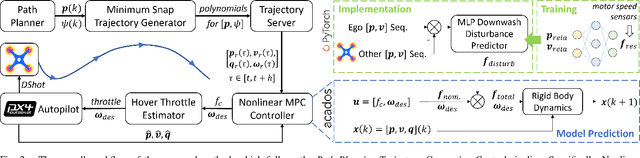
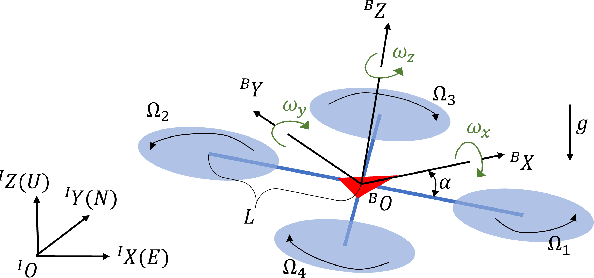
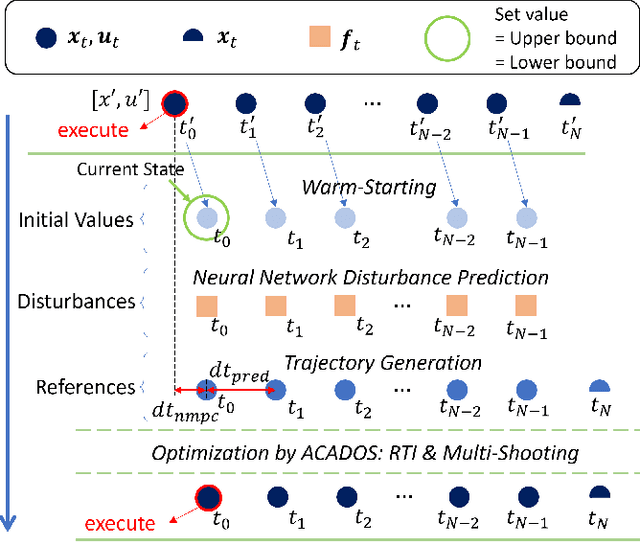
Swarm aerial robots are required to maintain close proximity to successfully traverse narrow areas in cluttered environments. However, this movement is affected by the downwash effect generated by the other quadrotors in the swarm. This aerodynamic effect is highly nonlinear and hard to model by classic mathematical methods. In addition, the motor speeds of quadrotors are risky to reach the limit when resisting the effect. To solve these problems, we integrate a Neural network Downwash Predictor with Nonlinear Model Predictive Control (NDP-NMPC) to propose a trajectory-tracking approach. The network is trained with spectral normalization to ensure robustness and safety on uncollected cases. The predicted disturbances are then incorporated into the optimization scheme in NMPC, which handles constraints to ensure that the motor speed remains within safe limits. We also design a quadrotor system, identify its parameters, and implement the proposed method onboard. Finally, we conduct an open-loop prediction experiment to verify the safety and effectiveness of the network, and a real-time closed-loop trajectory tracking experiment which demonstrates a 75.37% reduction of tracking error in height under the downwash effect.