 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneral Modular Harness for LLM Agents in Multi-Turn Gaming Environments
Jul 15, 2025We introduce a modular harness design for LLM agents that composes of perception, memory, and reasoning components, enabling a single LLM or VLM backbone to tackle a wide spectrum of multi turn gaming environments without domain-specific engineering. Using classic and modern game suites as low-barrier, high-diversity testbeds, our framework provides a unified workflow for analyzing how each module affects performance across dynamic interactive settings. Extensive experiments demonstrate that the harness lifts gameplay performance consistently over un-harnessed baselines and reveals distinct contribution patterns, for example, memory dominates in long-horizon puzzles while perception is critical in vision noisy arcades. These findings highlight the effectiveness of our modular harness design in advancing general-purpose agent, given the familiarity and ubiquity of games in everyday human experience.
lmgame-Bench: How Good are LLMs at Playing Games?
May 21, 2025Playing video games requires perception, memory, and planning, exactly the faculties modern large language model (LLM) agents are expected to master. We study the major challenges in using popular video games to evaluate modern LLMs and find that directly dropping LLMs into games cannot make an effective evaluation, for three reasons -- brittle vision perception, prompt sensitivity, and potential data contamination. We introduce lmgame-Bench to turn games into reliable evaluations. lmgame-Bench features a suite of platformer, puzzle, and narrative games delivered through a unified Gym-style API and paired with lightweight perception and memory scaffolds, and is designed to stabilize prompt variance and remove contamination. Across 13 leading models, we show lmgame-Bench is challenging while still separating models well. Correlation analysis shows that every game probes a unique blend of capabilities often tested in isolation elsewhere. More interestingly, performing reinforcement learning on a single game from lmgame-Bench transfers both to unseen games and to external planning tasks. Our evaluation code is available at https://github.com/lmgame-org/GamingAgent/lmgame-bench.
Light-YOLOv8-Flame: A Lightweight High-Performance Flame Detection Algorithm
Apr 15, 2025Fire detection algorithms, particularly those based on computer vision, encounter significant challenges such as high computational costs and delayed response times, which hinder their application in real-time systems. To address these limitations, this paper introduces Light-YOLOv8-Flame, a lightweight flame detection algorithm specifically designed for fast and efficient real-time deployment. The proposed model enhances the YOLOv8 architecture through the substitution of the original C2f module with the FasterNet Block module. This new block combines Partial Convolution (PConv) and Convolution (Conv) layers, reducing both computational complexity and model size. A dataset comprising 7,431 images, representing both flame and non-flame scenarios, was collected and augmented for training purposes. Experimental findings indicate that the modified YOLOv8 model achieves a 0.78% gain in mean average precision (mAP) and a 2.05% boost in recall, while reducing the parameter count by 25.34%, with only a marginal decrease in precision by 0.82%. These findings highlight that Light-YOLOv8-Flame offers enhanced detection performance and speed, making it well-suited for real-time fire detection on resource-constrained devices.
Combining Priors with Experience: Confidence Calibration Based on Binomial Process Modeling
Dec 18, 2024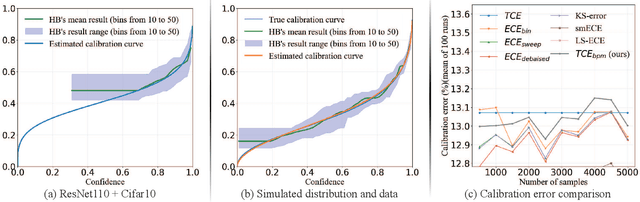
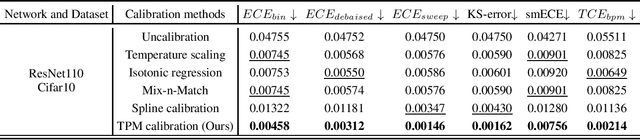
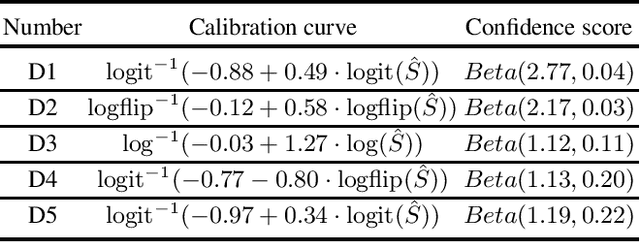
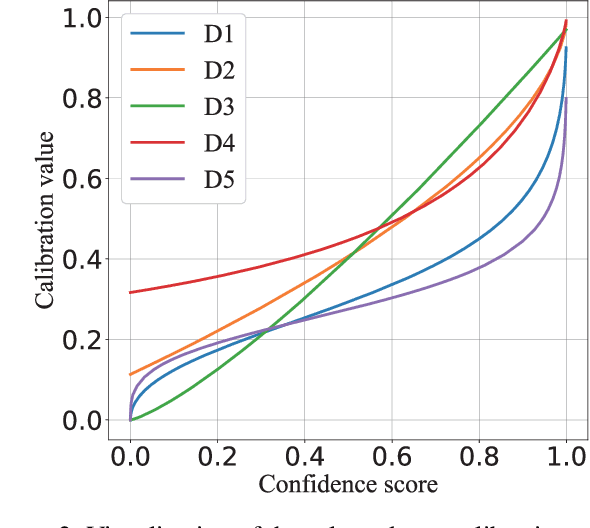
Confidence calibration of classification models is a technique to estimate the true posterior probability of the predicted class, which is critical for ensuring reliable decision-making in practical applications. Existing confidence calibration methods mostly use statistical techniques to estimate the calibration curve from data or fit a user-defined calibration function, but often overlook fully mining and utilizing the prior distribution behind the calibration curve. However, a well-informed prior distribution can provide valuable insights beyond the empirical data under the limited data or low-density regions of confidence scores. To fill this gap, this paper proposes a new method that integrates the prior distribution behind the calibration curve with empirical data to estimate a continuous calibration curve, which is realized by modeling the sampling process of calibration data as a binomial process and maximizing the likelihood function of the binomial process. We prove that the calibration curve estimating method is Lipschitz continuous with respect to data distribution and requires a sample size of $3/B$ of that required for histogram binning, where $B$ represents the number of bins. Also, a new calibration metric ($TCE_{bpm}$), which leverages the estimated calibration curve to estimate the true calibration error (TCE), is designed. $TCE_{bpm}$ is proven to be a consistent calibration measure. Furthermore, realistic calibration datasets can be generated by the binomial process modeling from a preset true calibration curve and confidence score distribution, which can serve as a benchmark to measure and compare the discrepancy between existing calibration metrics and the true calibration error. The effectiveness of our calibration method and metric are verified in real-world and simulated data.
Potato: A Data-Oriented Programming 3D Simulator for Large-Scale Heterogeneous Swarm Robotics
Aug 24, 2023



Large-scale simulation with realistic nonlinear dynamic models is crucial for algorithms development for swarm robotics. However, existing platforms are mainly developed based on Object-Oriented Programming (OOP) and either use simple kinematic models to pursue a large number of simulating nodes or implement realistic dynamic models with limited simulating nodes. In this paper, we develop a simulator based on Data-Oriented Programming (DOP) that utilizes GPU parallel computing to achieve large-scale swarm robotic simulations. Specifically, we use a multi-process approach to simulate heterogeneous agents and leverage PyTorch with GPU to simulate homogeneous agents with a large number. We test our approach using a nonlinear quadrotor model and demonstrate that this DOP approach can maintain almost the same computational speed when quadrotors are less than 5,000. We also provide two examples to present the functionality of the platform.
Nonlinear MPC for Quadrotors in Close-Proximity Flight with Neural Network Downwash Prediction
Apr 16, 2023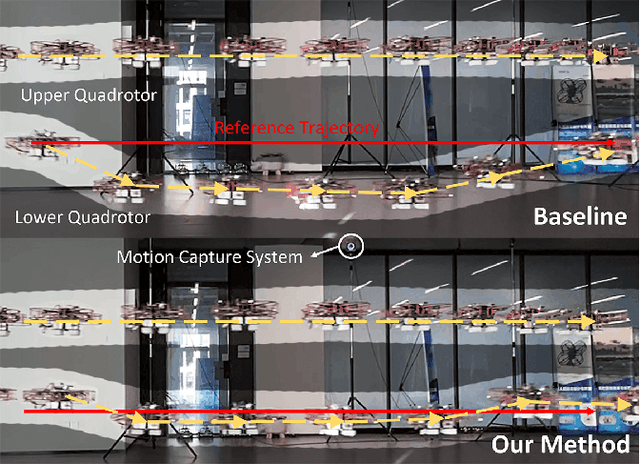
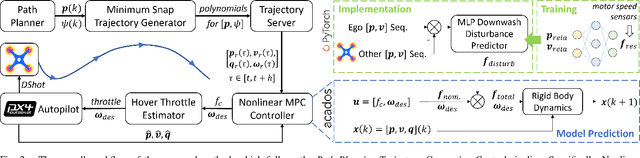
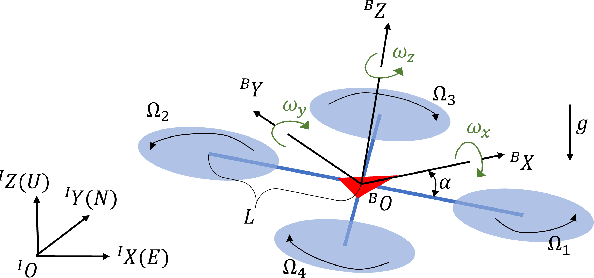
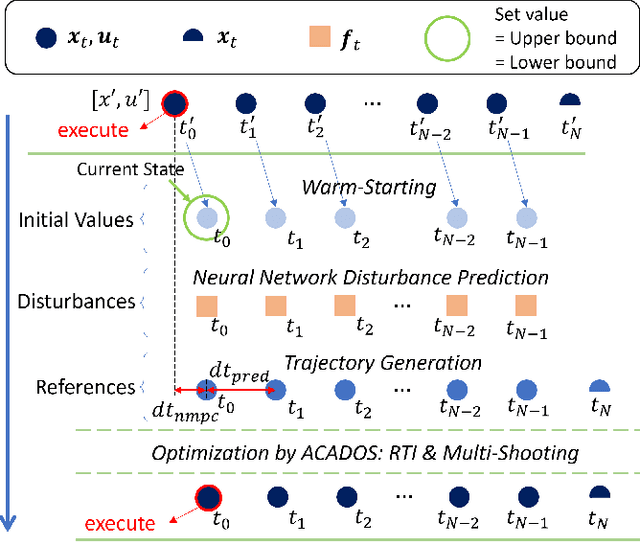
Swarm aerial robots are required to maintain close proximity to successfully traverse narrow areas in cluttered environments. However, this movement is affected by the downwash effect generated by the other quadrotors in the swarm. This aerodynamic effect is highly nonlinear and hard to model by classic mathematical methods. In addition, the motor speeds of quadrotors are risky to reach the limit when resisting the effect. To solve these problems, we integrate a Neural network Downwash Predictor with Nonlinear Model Predictive Control (NDP-NMPC) to propose a trajectory-tracking approach. The network is trained with spectral normalization to ensure robustness and safety on uncollected cases. The predicted disturbances are then incorporated into the optimization scheme in NMPC, which handles constraints to ensure that the motor speed remains within safe limits. We also design a quadrotor system, identify its parameters, and implement the proposed method onboard. Finally, we conduct an open-loop prediction experiment to verify the safety and effectiveness of the network, and a real-time closed-loop trajectory tracking experiment which demonstrates a 75.37% reduction of tracking error in height under the downwash effect.
Multitask Learning for Citation Purpose Classification
Jun 24, 2021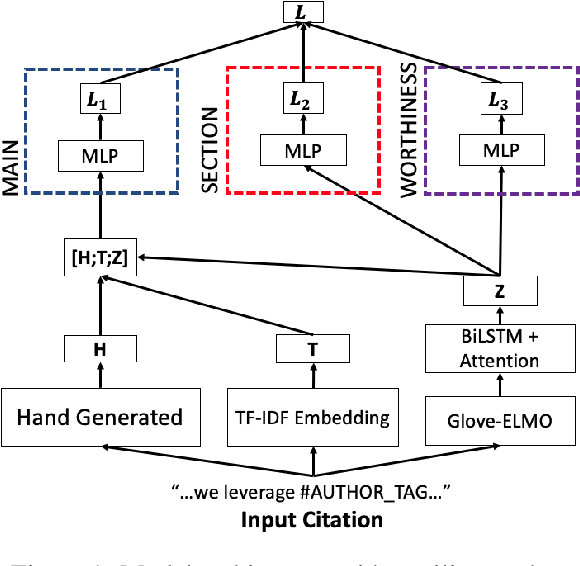
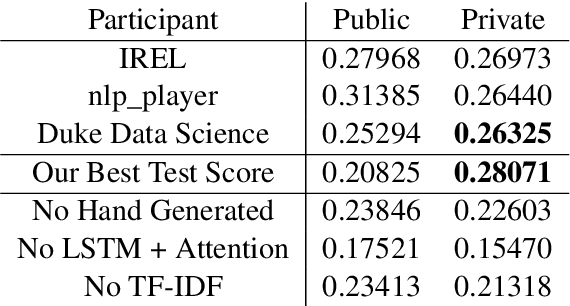
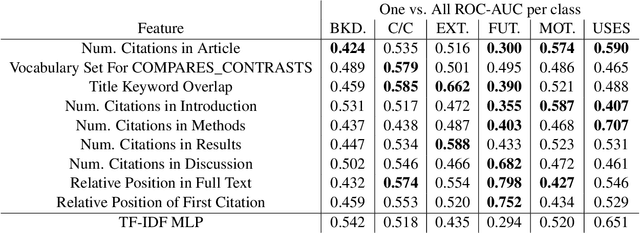
We present our entry into the 2021 3C Shared Task Citation Context Classification based on Purpose competition. The goal of the competition is to classify a citation in a scientific article based on its purpose. This task is important because it could potentially lead to more comprehensive ways of summarizing the purpose and uses of scientific articles, but it is also difficult, mainly due to the limited amount of available training data in which the purposes of each citation have been hand-labeled, along with the subjectivity of these labels. Our entry in the competition is a multi-task model that combines multiple modules designed to handle the problem from different perspectives, including hand-generated linguistic features, TF-IDF features, and an LSTM-with-attention model. We also provide an ablation study and feature analysis whose insights could lead to future work.
Using Low-rank Representation of Abundance Maps and Nonnegative Tensor Factorization for Hyperspectral Nonlinear Unmixing
Mar 30, 2021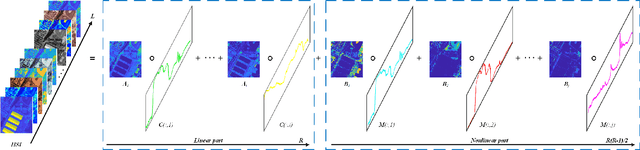
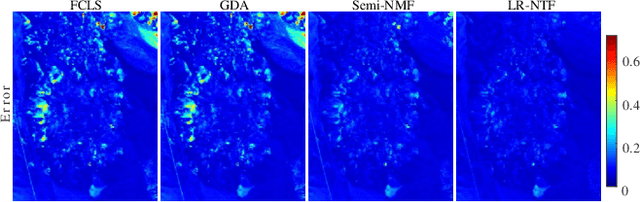
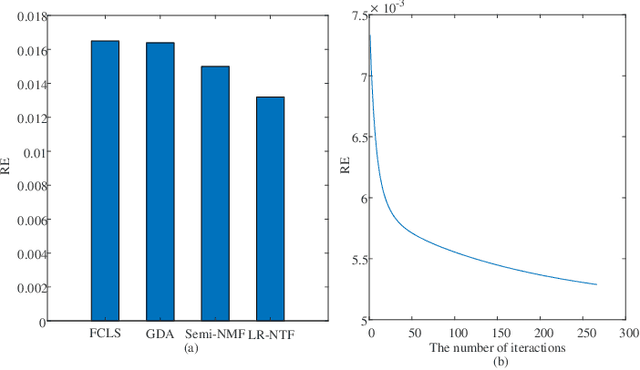
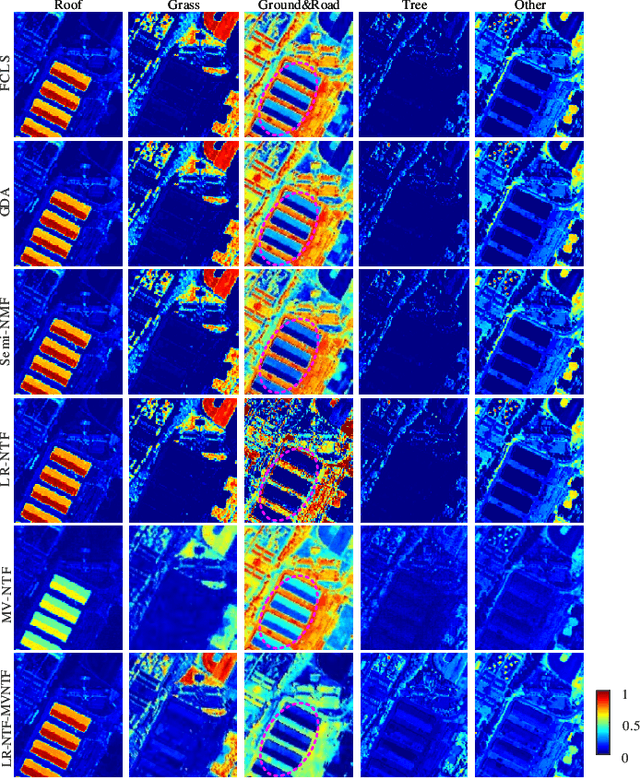
Tensor-based methods have been widely studied to attack inverse problems in hyperspectral imaging since a hyperspectral image (HSI) cube can be naturally represented as a third-order tensor, which can perfectly retain the spatial information in the image. In this article, we extend the linear tensor method to the nonlinear tensor method and propose a nonlinear low-rank tensor unmixing algorithm to solve the generalized bilinear model (GBM). Specifically, the linear and nonlinear parts of the GBM can both be expressed as tensors. Furthermore, the low-rank structures of abundance maps and nonlinear interaction abundance maps are exploited by minimizing their nuclear norm, thus taking full advantage of the high spatial correlation in HSIs. Synthetic and real-data experiments show that the low rank of abundance maps and nonlinear interaction abundance maps exploited in our method can improve the performance of the nonlinear unmixing. A MATLAB demo of this work will be available at https://github.com/LinaZhuang for the sake of reproducibility.
Confused Modulo Projection based Somewhat Homomorphic Encryption -- Cryptosystem, Library and Applications on Secure Smart Cities
Dec 19, 2020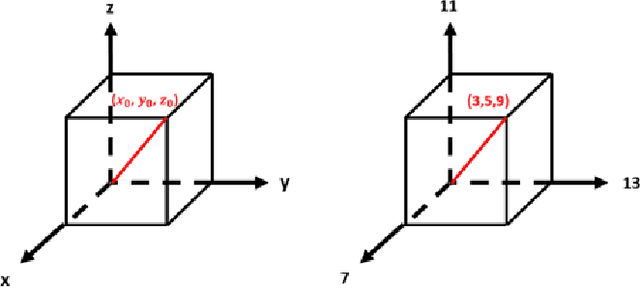
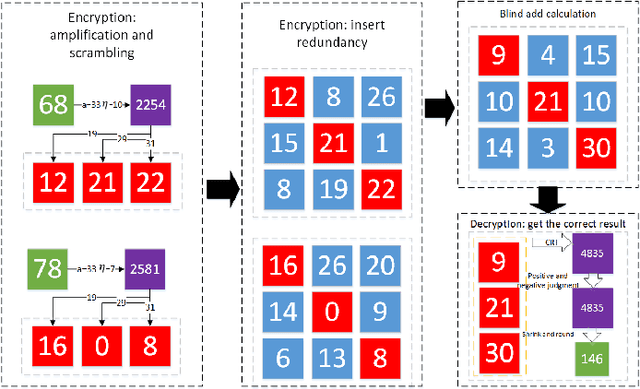
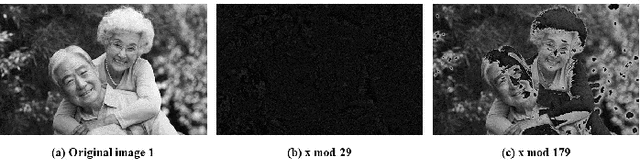
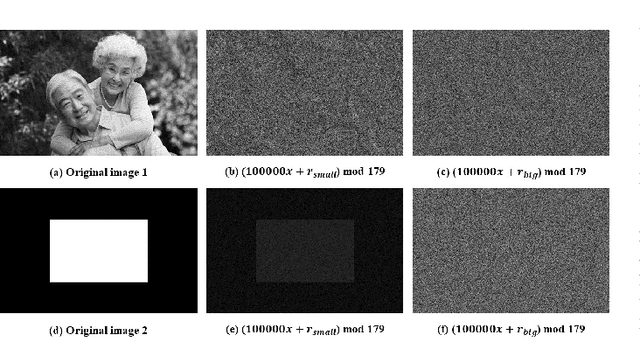
With the development of cloud computing, the storage and processing of massive visual media data has gradually transferred to the cloud server. For example, if the intelligent video monitoring system cannot process a large amount of data locally, the data will be uploaded to the cloud. Therefore, how to process data in the cloud without exposing the original data has become an important research topic. We propose a single-server version of somewhat homomorphic encryption cryptosystem based on confused modulo projection theorem named CMP-SWHE, which allows the server to complete blind data processing without \emph{seeing} the effective information of user data. On the client side, the original data is encrypted by amplification, randomization, and setting confusing redundancy. Operating on the encrypted data on the server side is equivalent to operating on the original data. As an extension, we designed and implemented a blind computing scheme of accelerated version based on batch processing technology to improve efficiency. To make this algorithm easy to use, we also designed and implemented an efficient general blind computing library based on CMP-SWHE. We have applied this library to foreground extraction, optical flow tracking and object detection with satisfactory results, which are helpful for building smart cities. We also discuss how to extend the algorithm to deep learning applications. Compared with other homomorphic encryption cryptosystems and libraries, the results show that our method has obvious advantages in computing efficiency. Although our algorithm has some tiny errors ($10^{-6}$) when the data is too large, it is very efficient and practical, especially suitable for blind image and video processing.