 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePotato: A Data-Oriented Programming 3D Simulator for Large-Scale Heterogeneous Swarm Robotics
Aug 24, 2023



Large-scale simulation with realistic nonlinear dynamic models is crucial for algorithms development for swarm robotics. However, existing platforms are mainly developed based on Object-Oriented Programming (OOP) and either use simple kinematic models to pursue a large number of simulating nodes or implement realistic dynamic models with limited simulating nodes. In this paper, we develop a simulator based on Data-Oriented Programming (DOP) that utilizes GPU parallel computing to achieve large-scale swarm robotic simulations. Specifically, we use a multi-process approach to simulate heterogeneous agents and leverage PyTorch with GPU to simulate homogeneous agents with a large number. We test our approach using a nonlinear quadrotor model and demonstrate that this DOP approach can maintain almost the same computational speed when quadrotors are less than 5,000. We also provide two examples to present the functionality of the platform.
Nonlinear MPC for Quadrotors in Close-Proximity Flight with Neural Network Downwash Prediction
Apr 16, 2023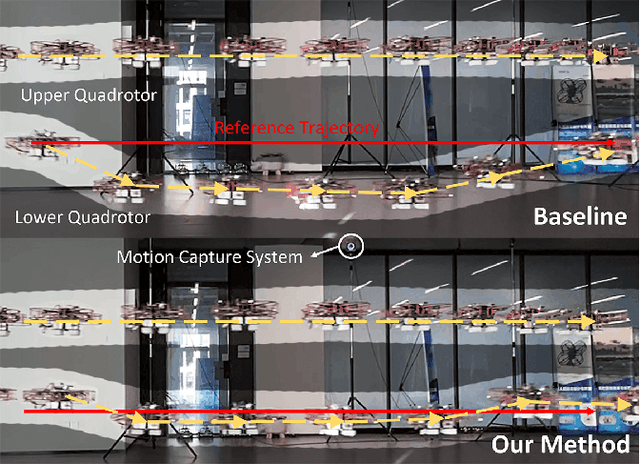
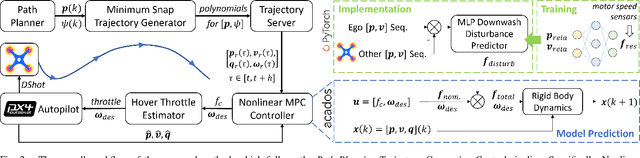
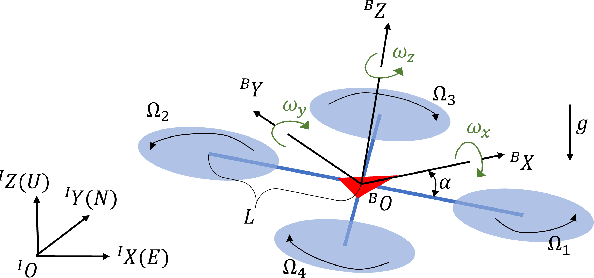
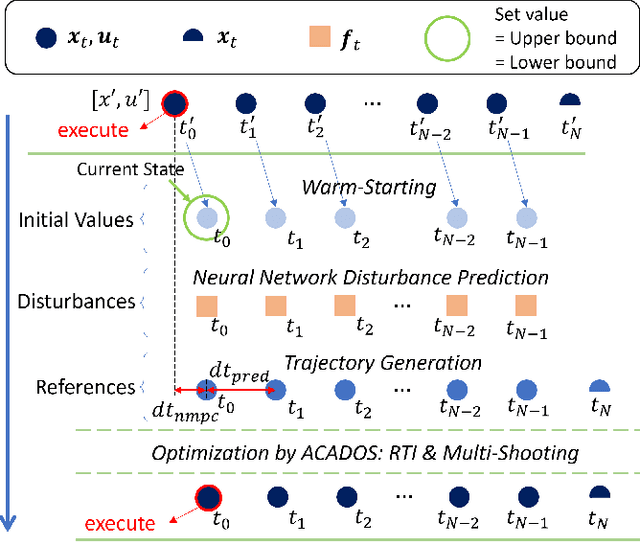
Swarm aerial robots are required to maintain close proximity to successfully traverse narrow areas in cluttered environments. However, this movement is affected by the downwash effect generated by the other quadrotors in the swarm. This aerodynamic effect is highly nonlinear and hard to model by classic mathematical methods. In addition, the motor speeds of quadrotors are risky to reach the limit when resisting the effect. To solve these problems, we integrate a Neural network Downwash Predictor with Nonlinear Model Predictive Control (NDP-NMPC) to propose a trajectory-tracking approach. The network is trained with spectral normalization to ensure robustness and safety on uncollected cases. The predicted disturbances are then incorporated into the optimization scheme in NMPC, which handles constraints to ensure that the motor speed remains within safe limits. We also design a quadrotor system, identify its parameters, and implement the proposed method onboard. Finally, we conduct an open-loop prediction experiment to verify the safety and effectiveness of the network, and a real-time closed-loop trajectory tracking experiment which demonstrates a 75.37% reduction of tracking error in height under the downwash effect.
Indoor Localization for Quadrotors using Invisible Projected Tags
Mar 13, 2022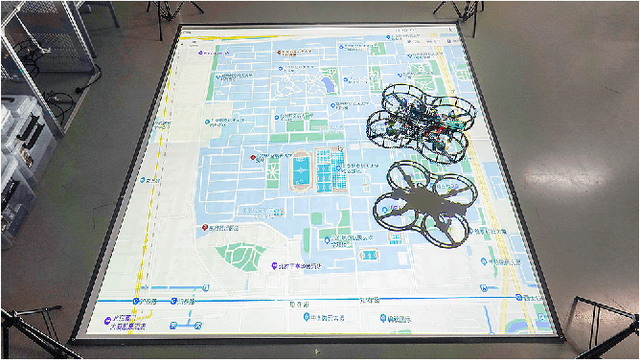
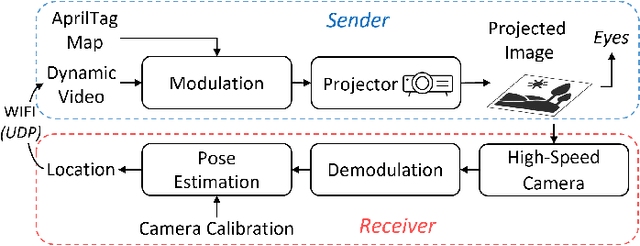
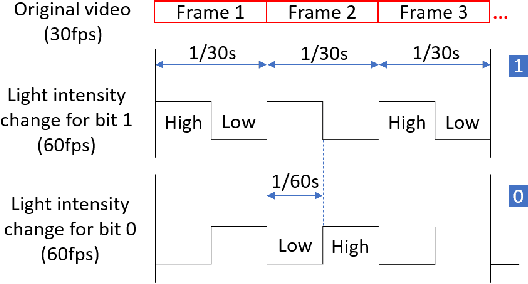
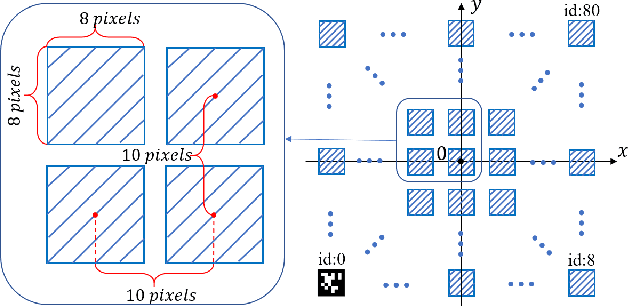
Augmented reality (AR) technology has been introduced into the robotics field to narrow the visual gap between indoor and outdoor environments. However, without signals from satellite navigation systems, flight experiments in these indoor AR scenarios need other accurate localization approaches. This work proposes a real-time centimeter-level indoor localization method based on psycho-visually invisible projected tags (IPT), requiring a projector as the sender and quadrotors with high-speed cameras as the receiver. The method includes a modulation process for the sender, as well as demodulation and pose estimation steps for the receiver, where screen-camera communication technology is applied to hide fiducial tags using human vision property. Experiments have demonstrated that IPT can achieve accuracy within ten centimeters and a speed of about ten FPS. Compared with other localization methods for AR robotics platforms, IPT is affordable by using only a projector and high-speed cameras as hardware consumption and convenient by omitting a coordinate alignment step. To the authors' best knowledge, this is the first time screen-camera communication is utilized for AR robot localization.
Asymmetric Totally-corrective Boosting for Real-time Object Detection
Sep 16, 2010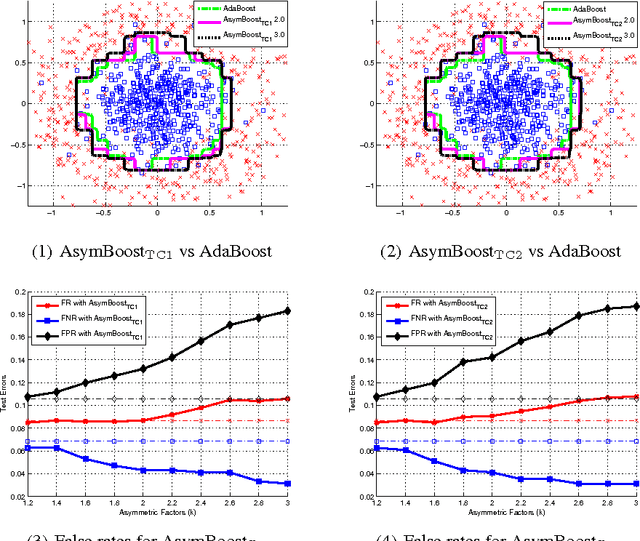
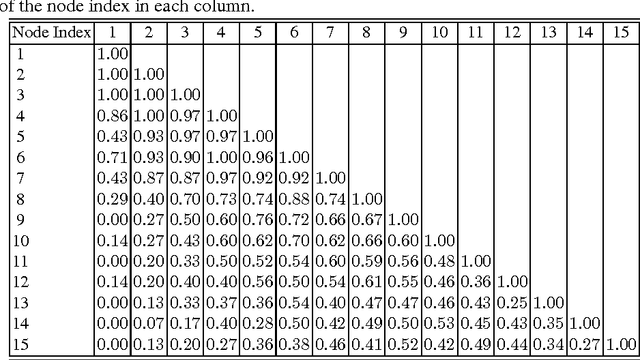
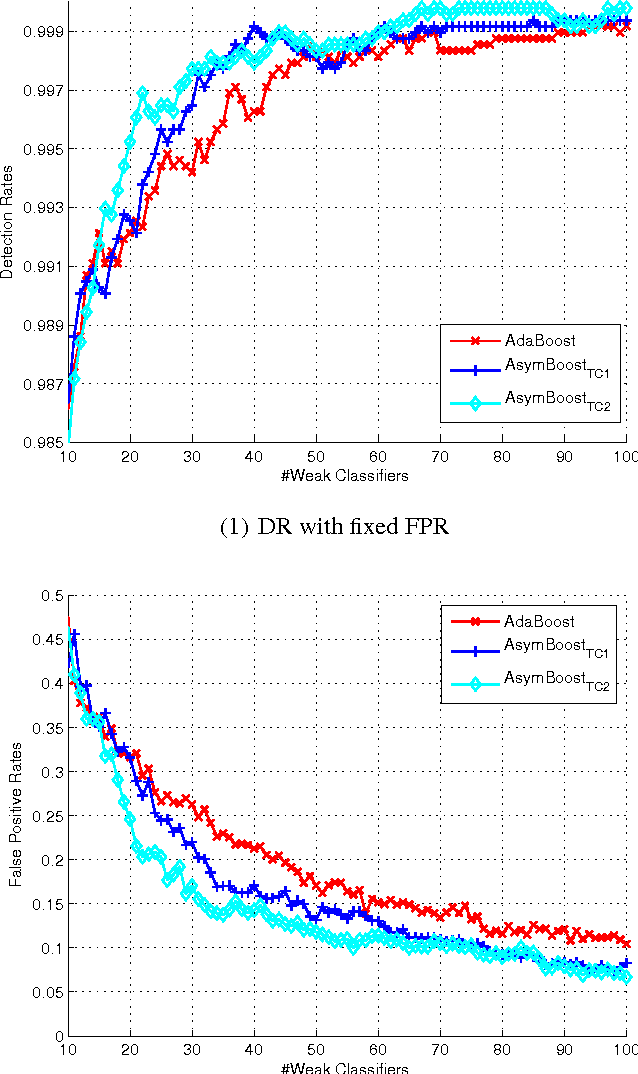
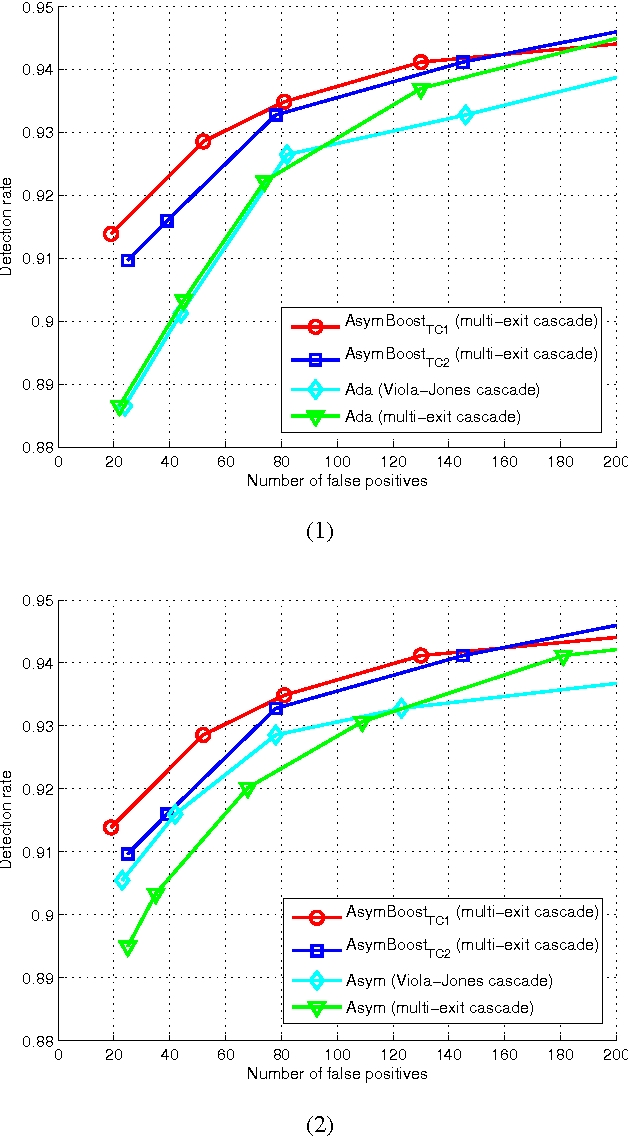
Real-time object detection is one of the core problems in computer vision. The cascade boosting framework proposed by Viola and Jones has become the standard for this problem. In this framework, the learning goal for each node is asymmetric, which is required to achieve a high detection rate and a moderate false positive rate. We develop new boosting algorithms to address this asymmetric learning problem. We show that our methods explicitly optimize asymmetric loss objectives in a totally corrective fashion. The methods are totally corrective in the sense that the coefficients of all selected weak classifiers are updated at each iteration. In contract, conventional boosting like AdaBoost is stage-wise in that only the current weak classifier's coefficient is updated. At the heart of the totally corrective boosting is the column generation technique. Experiments on face detection show that our methods outperform the state-of-the-art asymmetric boosting methods.