 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpherical Multi-Modal Place Recognition for Heterogeneous Sensor Systems
Paper and Code
Apr 17, 2021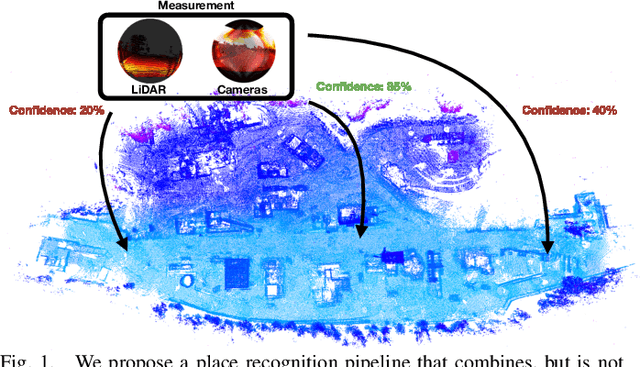
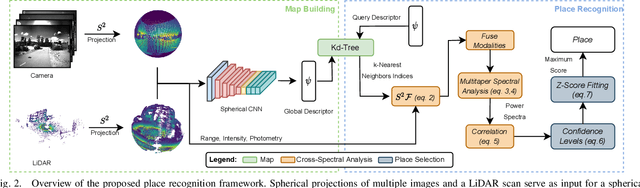
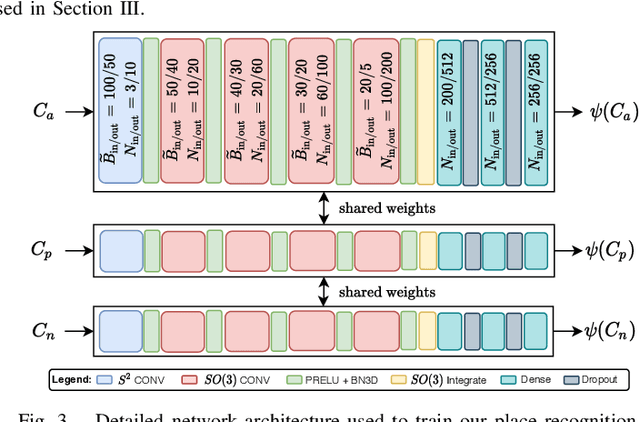
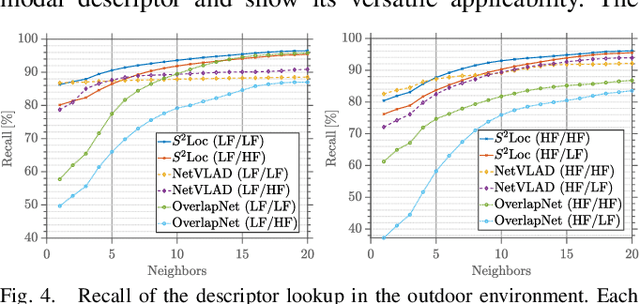
In this paper, we propose a robust end-to-end multi-modal pipeline for place recognition where the sensor systems can differ from the map building to the query. Our approach operates directly on images and LiDAR scans without requiring any local feature extraction modules. By projecting the sensor data onto the unit sphere, we learn a multi-modal descriptor of partially overlapping scenes using a spherical convolutional neural network. The employed spherical projection model enables the support of arbitrary LiDAR and camera systems readily without losing information. Loop closure candidates are found using a nearest-neighbor lookup in the embedding space. We tackle the problem of correctly identifying the closest place by correlating the candidates' power spectra, obtaining a confidence value per prospect. Our estimate for the correct place corresponds then to the candidate with the highest confidence. We evaluate our proposal w.r.t. state-of-the-art approaches in place recognition using real-world data acquired using different sensors. Our approach can achieve a recall that is up to 10% and 5% higher than for a LiDAR- and vision-based system, respectively, when the sensor setup differs between model training and deployment. Additionally, our place selection can correctly identify up to 95% matches from the candidate set.