 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCaRE: Finding Root Causes of Configuration Issues in Highly-Configurable Robots
Jan 18, 2023



Robotic systems have several subsystems that possess a huge combinatorial configuration space and hundreds or even thousands of possible software and hardware configuration options interacting non-trivially. The configurable parameters can be tailored to target specific objectives, but when incorrectly configured, can cause functional faults. Finding the root cause of such faults is challenging due to the exponentially large configuration space and the dependencies between the robot's configuration settings and performance. This paper proposes CaRE, a method for diagnosing the root cause of functional faults through the lens of causality, which abstracts the causal relationships between various configuration options and the robot's performance objectives. We demonstrate CaRE's efficacy by finding the root cause of the observed functional faults via CaRE and validating the diagnosed root cause, conducting experiments in both physical robots (Husky and Turtlebot 3) and in simulation (Gazebo). Furthermore, we demonstrate that the causal models learned from robots in simulation (simulating Husky in Gazebo) are transferable to physical robots across different platforms (Turtlebot 3).
Towards Adaptive Planning of Assistive-care Robot Tasks
Sep 28, 2022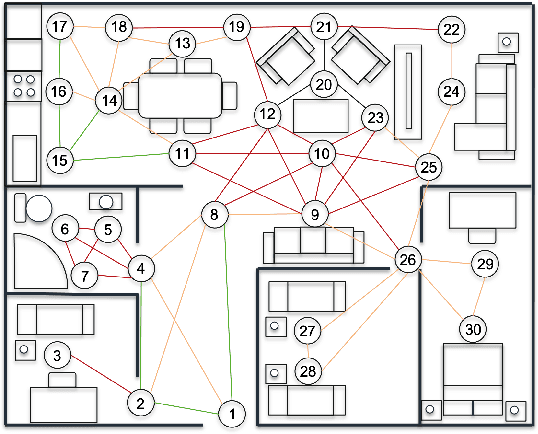


This 'research preview' paper introduces an adaptive path planning framework for robotic mission execution in assistive-care applications. The framework provides a graph-based environment modelling approach, with dynamic path finding performed using Dijkstra's algorithm. A predictive module that uses probabilistic model checking is applied to estimate the human's movement through the environment, allowing run-time re-planning of the robot's path. We illustrate the use of the framework for a simulated assistive-care case study in which a mobile robot navigates through the environment and monitors an end user with mild physical or cognitive impairments.
* In Proceedings FMAS2022 ASYDE2022, arXiv:2209.13181
Scheduling of Missions with Constrained Tasks for Heterogeneous Robot Systems
Sep 28, 2022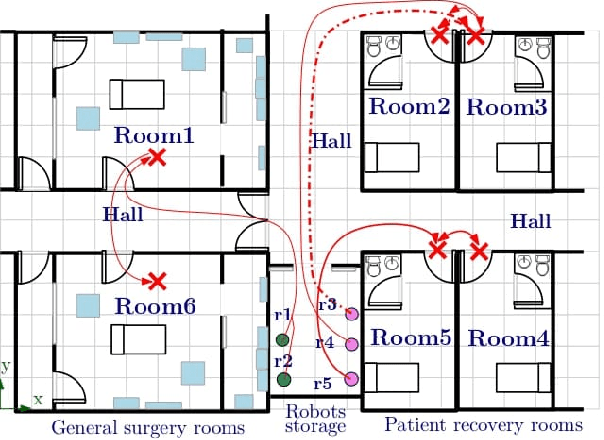
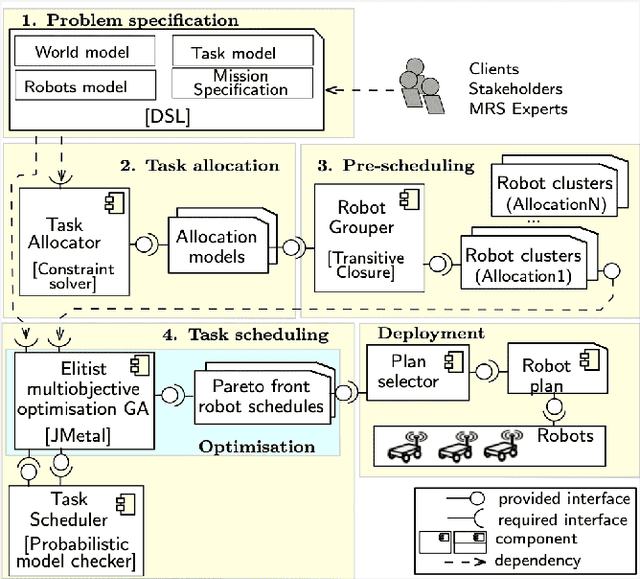
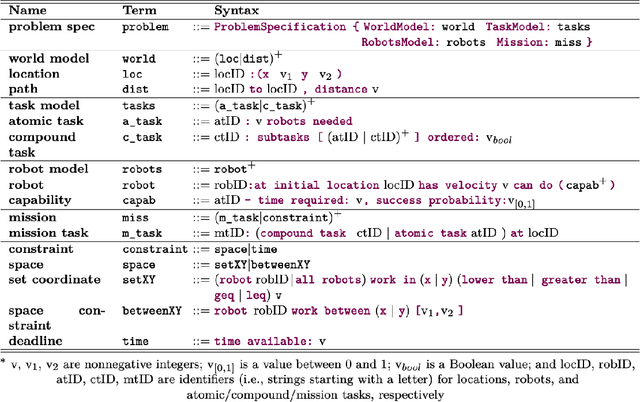
We present a formal tasK AllocatioN and scheduling apprOAch for multi-robot missions (KANOA). KANOA supports two important types of task constraints: task ordering, which requires the execution of several tasks in a specified order; and joint tasks, which indicates tasks that must be performed by more than one robot. To mitigate the complexity of robotic mission planning, KANOA handles the allocation of the mission tasks to robots, and the scheduling of the allocated tasks separately. To that end, the task allocation problem is formalised in first-order logic and resolved using the Alloy model analyzer, and the task scheduling problem is encoded as a Markov decision process and resolved using the PRISM probabilistic model checker. We illustrate the application of KANOA through a case study in which a heterogeneous robotic team is assigned a hospital maintenance mission.
* In Proceedings FMAS2022 ASYDE2022, arXiv:2209.13181
Machine Learning Meets Quantitative Planning: Enabling Self-Adaptation in Autonomous Robots
Mar 10, 2019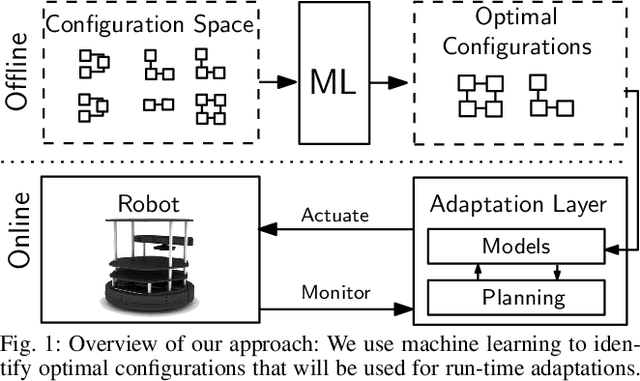
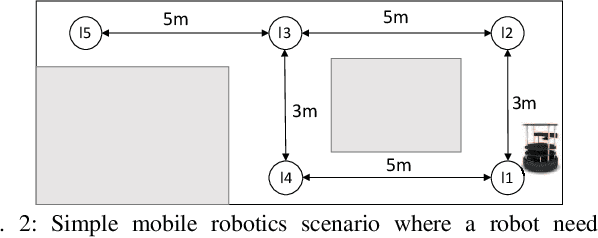
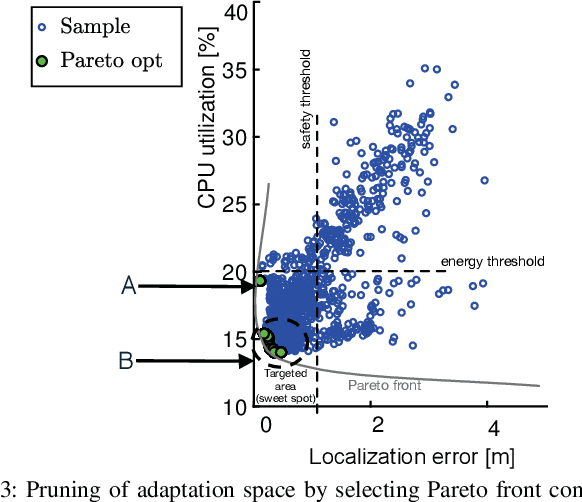
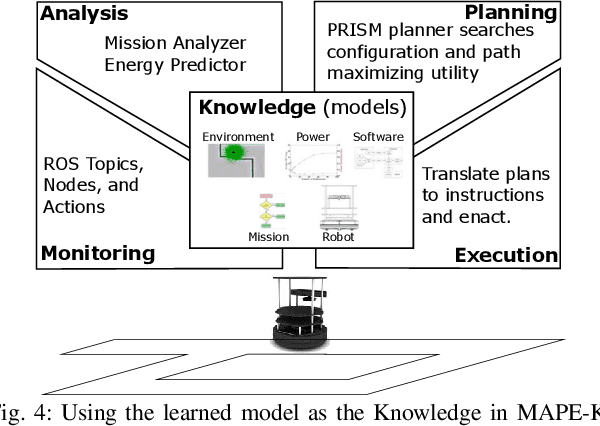
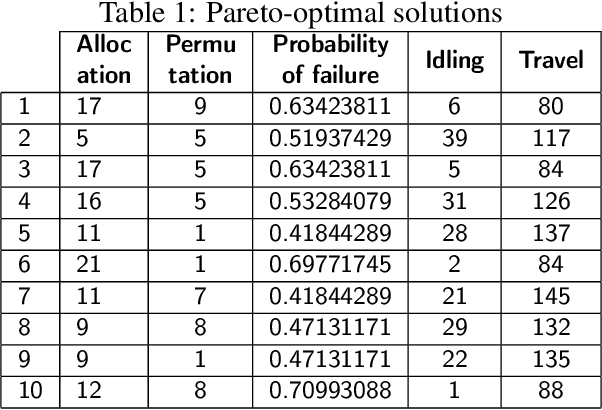
Modern cyber-physical systems (e.g., robotics systems) are typically composed of physical and software components, the characteristics of which are likely to change over time. Assumptions about parts of the system made at design time may not hold at run time, especially when a system is deployed for long periods (e.g., over decades). Self-adaptation is designed to find reconfigurations of systems to handle such run-time inconsistencies. Planners can be used to find and enact optimal reconfigurations in such an evolving context. However, for systems that are highly configurable, such planning becomes intractable due to the size of the adaptation space. To overcome this challenge, in this paper we explore an approach that (a) uses machine learning to find Pareto-optimal configurations without needing to explore every configuration and (b) restricts the search space to such configurations to make planning tractable. We explore this in the context of robot missions that need to consider task timeliness and energy consumption. An independent evaluation shows that our approach results in high-quality adaptation plans in uncertain and adversarial environments.