Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Adaptive Planning of Assistive-care Robot Tasks
Sep 28, 2022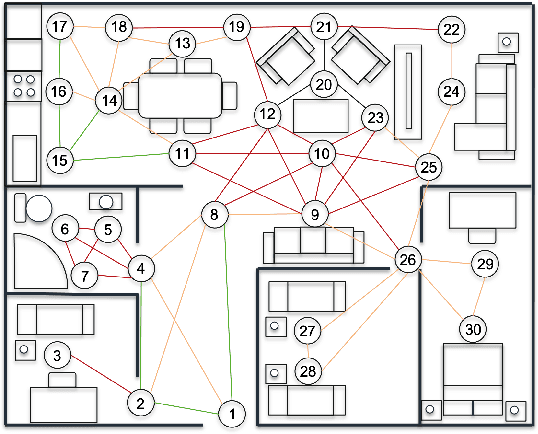


This 'research preview' paper introduces an adaptive path planning framework for robotic mission execution in assistive-care applications. The framework provides a graph-based environment modelling approach, with dynamic path finding performed using Dijkstra's algorithm. A predictive module that uses probabilistic model checking is applied to estimate the human's movement through the environment, allowing run-time re-planning of the robot's path. We illustrate the use of the framework for a simulated assistive-care case study in which a mobile robot navigates through the environment and monitors an end user with mild physical or cognitive impairments.
* EPTCS 371, 2022, pp. 175-183
* In Proceedings FMAS2022 ASYDE2022, arXiv:2209.13181
* In Proceedings FMAS2022 ASYDE2022, arXiv:2209.13181
Via