 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Safety Verification for an Autonomous Ground Vehicle: A Situation Coverage Grid Approach
Jul 16, 2025As industrial autonomous ground vehicles are increasingly deployed in safety-critical environments, ensuring their safe operation under diverse conditions is paramount. This paper presents a novel approach for their safety verification based on systematic situation extraction, probabilistic modelling and verification. We build upon the concept of a situation coverage grid, which exhaustively enumerates environmental configurations relevant to the vehicle's operation. This grid is augmented with quantitative probabilistic data collected from situation-based system testing, capturing probabilistic transitions between situations. We then generate a probabilistic model that encodes the dynamics of both normal and unsafe system behaviour. Safety properties extracted from hazard analysis and formalised in temporal logic are verified through probabilistic model checking against this model. The results demonstrate that our approach effectively identifies high-risk situations, provides quantitative safety guarantees, and supports compliance with regulatory standards, thereby contributing to the robust deployment of autonomous systems.
Symbolic Runtime Verification and Adaptive Decision-Making for Robot-Assisted Dressing
Apr 22, 2025We present a control framework for robot-assisted dressing that augments low-level hazard response with runtime monitoring and formal verification. A parametric discrete-time Markov chain (pDTMC) models the dressing process, while Bayesian inference dynamically updates this pDTMC's transition probabilities based on sensory and user feedback. Safety constraints from hazard analysis are expressed in probabilistic computation tree logic, and symbolically verified using a probabilistic model checker. We evaluate reachability, cost, and reward trade-offs for garment-snag mitigation and escalation, enabling real-time adaptation. Our approach provides a formal yet lightweight foundation for safety-aware, explainable robotic assistance.
Adaptive Human-Robot Collaborative Missions using Hybrid Task Planning
Apr 09, 2025Producing robust task plans in human-robot collaborative missions is a critical activity in order to increase the likelihood of these missions completing successfully. Despite the broad research body in the area, which considers different classes of constraints and uncertainties, its applicability is confined to relatively simple problems that can be comfortably addressed by the underpinning mathematically-based or heuristic-driven solver engines. In this paper, we introduce a hybrid approach that effectively solves the task planning problem by decomposing it into two intertwined parts, starting with the identification of a feasible plan and followed by its uncertainty augmentation and verification yielding a set of Pareto optimal plans. To enhance its robustness, adaptation tactics are devised for the evolving system requirements and agents' capabilities. We demonstrate our approach through an industrial case study involving workers and robots undertaking activities within a vineyard, showcasing the benefits of our hybrid approach both in the generation of feasible solutions and scalability compared to native planners.
Scheduling of Missions with Constrained Tasks for Heterogeneous Robot Systems
Sep 28, 2022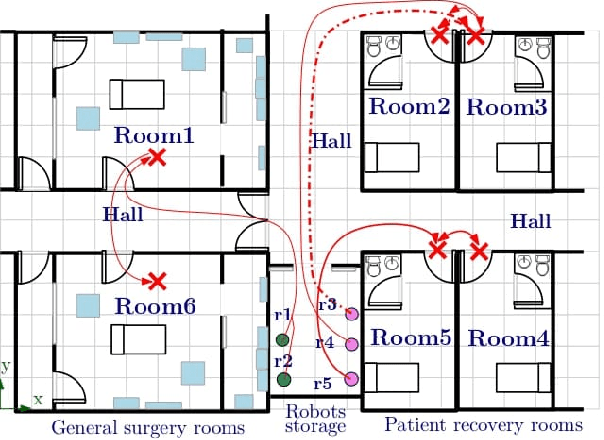
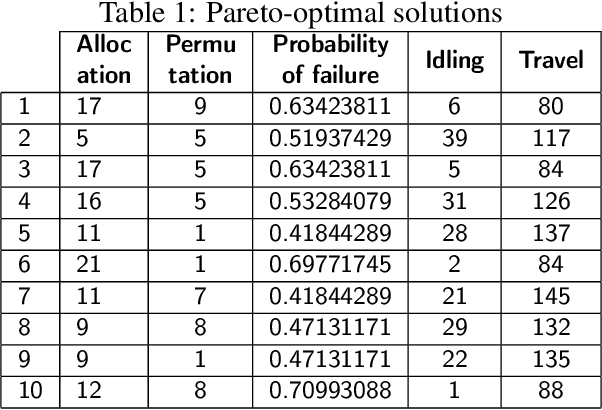
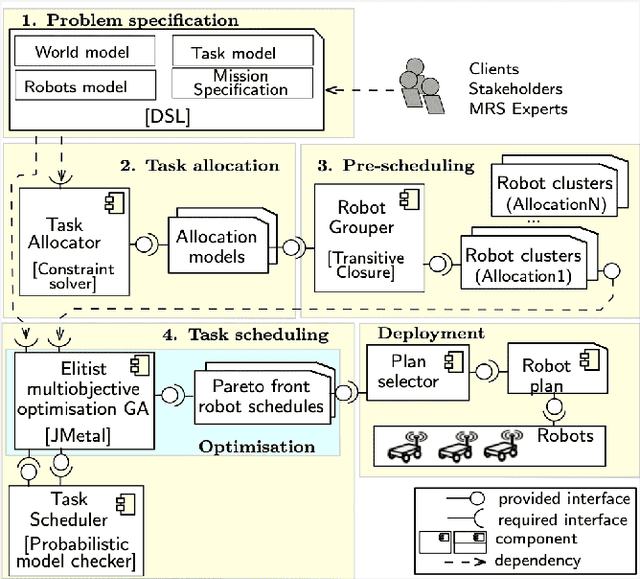
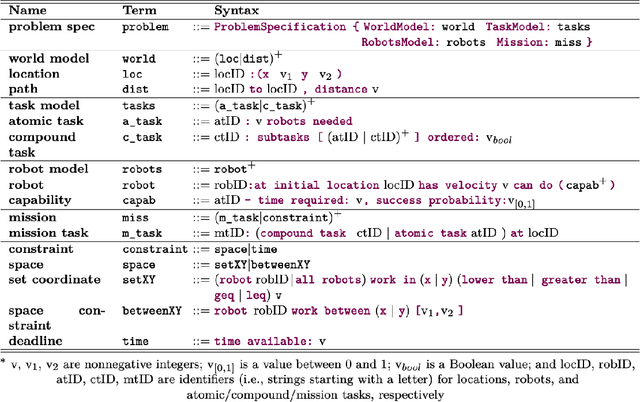
We present a formal tasK AllocatioN and scheduling apprOAch for multi-robot missions (KANOA). KANOA supports two important types of task constraints: task ordering, which requires the execution of several tasks in a specified order; and joint tasks, which indicates tasks that must be performed by more than one robot. To mitigate the complexity of robotic mission planning, KANOA handles the allocation of the mission tasks to robots, and the scheduling of the allocated tasks separately. To that end, the task allocation problem is formalised in first-order logic and resolved using the Alloy model analyzer, and the task scheduling problem is encoded as a Markov decision process and resolved using the PRISM probabilistic model checker. We illustrate the application of KANOA through a case study in which a heterogeneous robotic team is assigned a hospital maintenance mission.
* In Proceedings FMAS2022 ASYDE2022, arXiv:2209.13181
Discrete-Event Controller Synthesis for Autonomous Systems with Deep-Learning Perception Components
Feb 07, 2022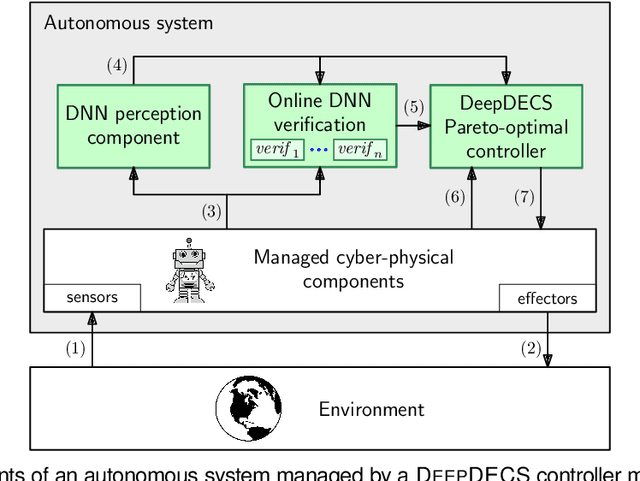
We present DEEPDECS, a new method for the synthesis of correct-by-construction discrete-event controllers for autonomous systems that use deep neural network (DNN) classifiers for the perception step of their decision-making processes. Despite major advances in deep learning in recent years, providing safety guarantees for these systems remains very challenging. Our controller synthesis method addresses this challenge by integrating DNN verification with the synthesis of verified Markov models. The synthesised models correspond to discrete-event controllers guaranteed to satisfy the safety, dependability and performance requirements of the autonomous system, and to be Pareto optimal with respect to a set of optimisation criteria. We use the method in simulation to synthesise controllers for mobile-robot collision avoidance, and for maintaining driver attentiveness in shared-control autonomous driving.