 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Objective Multi-Fidelity Bayesian Optimization with Causal Priors
Jan 31, 2026Multi-fidelity Bayesian optimization (MFBO) accelerates the search for the global optimum of black-box functions by integrating inexpensive, low-fidelity approximations. The central task of an MFBO policy is to balance the cost-efficiency of low-fidelity proxies against their reduced accuracy to ensure effective progression toward the high-fidelity optimum. Existing MFBO methods primarily capture associational dependencies between inputs, fidelities, and objectives, rather than causal mechanisms, and can perform poorly when lower-fidelity proxies are poorly aligned with the target fidelity. We propose RESCUE (REducing Sampling cost with Causal Understanding and Estimation), a multi-objective MFBO method that incorporates causal calculus to systematically address this challenge. RESCUE learns a structural causal model capturing causal relationships between inputs, fidelities, and objectives, and uses it to construct a probabilistic multi-fidelity (MF) surrogate that encodes intervention effects. Exploiting the causal structure, we introduce a causal hypervolume knowledge-gradient acquisition strategy to select input-fidelity pairs that balance expected multi-objective improvement and cost. We show that RESCUE improves sample efficiency over state-of-the-art MF optimization methods on synthetic and real-world problems in robotics, machine learning (AutoML), and healthcare.
CURE: Simulation-Augmented Auto-Tuning in Robotics
Feb 08, 2024



Robotic systems are typically composed of various subsystems, such as localization and navigation, each encompassing numerous configurable components (e.g., selecting different planning algorithms). Once an algorithm has been selected for a component, its associated configuration options must be set to the appropriate values. Configuration options across the system stack interact non-trivially. Finding optimal configurations for highly configurable robots to achieve desired performance poses a significant challenge due to the interactions between configuration options across software and hardware that result in an exponentially large and complex configuration space. These challenges are further compounded by the need for transferability between different environments and robotic platforms. Data efficient optimization algorithms (e.g., Bayesian optimization) have been increasingly employed to automate the tuning of configurable parameters in cyber-physical systems. However, such optimization algorithms converge at later stages, often after exhausting the allocated budget (e.g., optimization steps, allotted time) and lacking transferability. This paper proposes CURE -- a method that identifies causally relevant configuration options, enabling the optimization process to operate in a reduced search space, thereby enabling faster optimization of robot performance. CURE abstracts the causal relationships between various configuration options and robot performance objectives by learning a causal model in the source (a low-cost environment such as the Gazebo simulator) and applying the learned knowledge to perform optimization in the target (e.g., Turtlebot 3 physical robot). We demonstrate the effectiveness and transferability of CURE by conducting experiments that involve varying degrees of deployment changes in both physical robots and simulation.
BiofilmScanner: A Computational Intelligence Approach to Obtain Bacterial Cell Morphological Attributes from Biofilm Image
Feb 19, 2023



Desulfovibrio alaskensis G20 (DA-G20) is utilized as a model for sulfate-reducing bacteria (SRB) that are associated with corrosion issues caused by microorganisms. SRB-based biofilms are thought to be responsible for the billion-dollar-per-year bio-corrosion of metal infrastructure. Understanding the extraction of the bacterial cells' shape and size properties in the SRB-biofilm at different growth stages will assist with the design of anti-corrosion techniques. However, numerous issues affect current approaches, including time-consuming geometric property extraction, low efficiency, and high error rates. This paper proposes BiofilScanner, a Yolact-based deep learning method integrated with invariant moments to address these problems. Our approach efficiently detects and segments bacterial cells in an SRB image while simultaneously invariant moments measure the geometric characteristics of the segmented cells with low errors. The numerical experiments of the proposed method demonstrate that the BiofilmScanner is 2.1x and 6.8x faster than our earlier Mask-RCNN and DLv3+ methods for detecting, segmenting, and measuring the geometric properties of the cell. Furthermore, the BiofilmScanner achieved an F1-score of 85.28% while Mask-RCNN and DLv3+ obtained F1-scores of 77.67% and 75.18%, respectively.
CaRE: Finding Root Causes of Configuration Issues in Highly-Configurable Robots
Jan 18, 2023



Robotic systems have several subsystems that possess a huge combinatorial configuration space and hundreds or even thousands of possible software and hardware configuration options interacting non-trivially. The configurable parameters can be tailored to target specific objectives, but when incorrectly configured, can cause functional faults. Finding the root cause of such faults is challenging due to the exponentially large configuration space and the dependencies between the robot's configuration settings and performance. This paper proposes CaRE, a method for diagnosing the root cause of functional faults through the lens of causality, which abstracts the causal relationships between various configuration options and the robot's performance objectives. We demonstrate CaRE's efficacy by finding the root cause of the observed functional faults via CaRE and validating the diagnosed root cause, conducting experiments in both physical robots (Husky and Turtlebot 3) and in simulation (Gazebo). Furthermore, we demonstrate that the causal models learned from robots in simulation (simulating Husky in Gazebo) are transferable to physical robots across different platforms (Turtlebot 3).
Total Nitrogen Estimation in Agricultural Soils via Aerial Multispectral Imaging and LIBS
Jul 06, 2021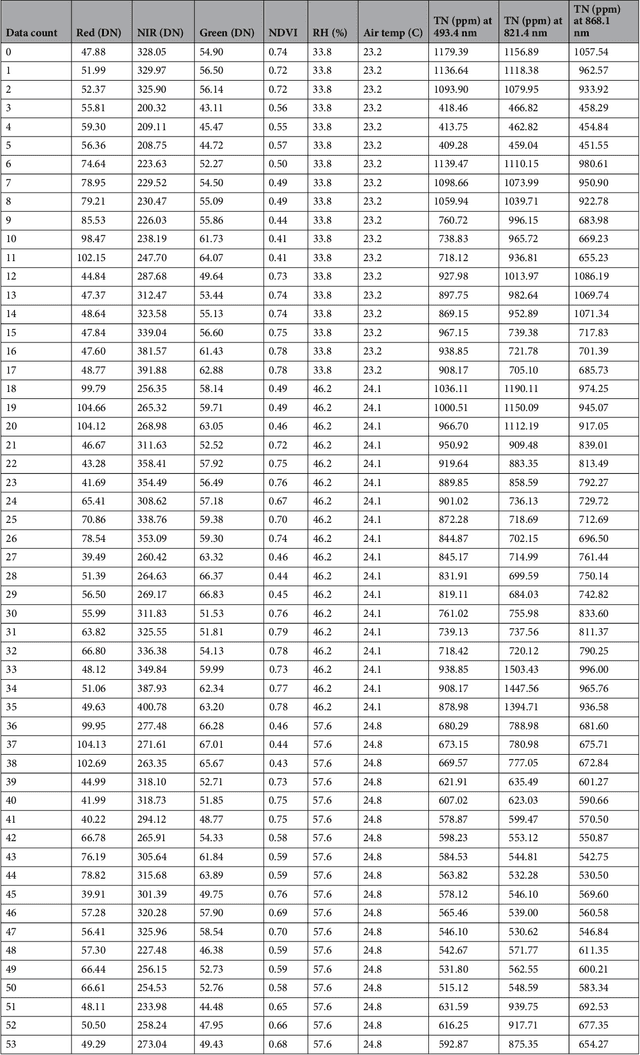

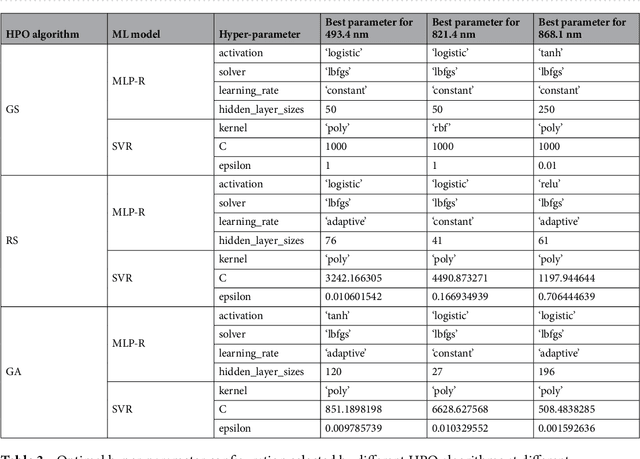
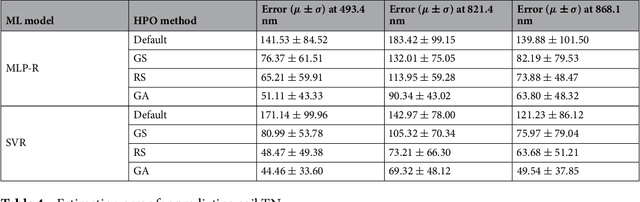
Measuring soil health indicators is an important and challenging task that affects farmers' decisions on timing, placement, and quantity of fertilizers applied in the farms. Most existing methods to measure soil health indicators (SHIs) are in-lab wet chemistry or spectroscopy-based methods, which require significant human input and effort, time-consuming, costly, and are low-throughput in nature. To address this challenge, we develop an artificial intelligence (AI)-driven near real-time unmanned aerial vehicle (UAV)-based multispectral sensing (UMS) solution to estimate total nitrogen (TN) of the soil, an important macro-nutrient or SHI that directly affects the crop health. Accurate prediction of soil TN can significantly increase crop yield through informed decision making on the timing of seed planting, and fertilizer quantity and timing. We train two machine learning models including multi-layer perceptron and support vector machine to predict the soil nitrogen using a suite of data classes including multispectral characteristics of the soil and crops in red, near-infrared, and green spectral bands, computed vegetation indices, and environmental variables including air temperature and relative humidity. To generate the ground-truth data or the training data for the machine learning models, we measure the total nitrogen of the soil samples (collected from a farm) using laser-induced breakdown spectroscopy (LIBS).
* 11 pages, 10 figures, published in scientific reports