 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMROS: Runtime Adaptation For Robot Control Architectures
Oct 19, 2020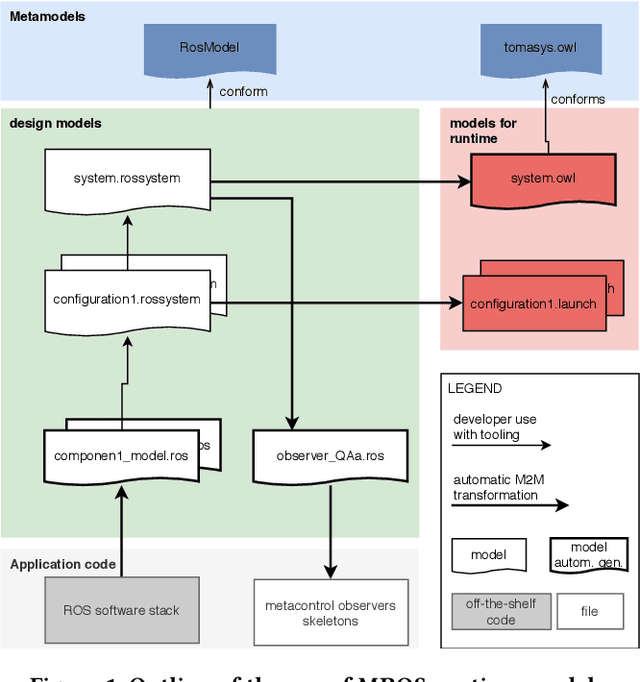

Known attempts to build autonomous robots rely on complex control architectures, often implemented with the Robot Operating System platform (ROS). These architectures need to be dynamically adaptable in order to cope with changing environment conditions, new mission requirements or component failures. The implementation of adaptable architectures is very often ad hoc, quickly gets cumbersome and expensive. We present a structured model-based framework for the adaptation of robot control architectures at run-time to satisfy set quality requirements. We use a formal meta-model to represent the configuration space of control architectures and the corresponding mission requirements. The meta-model is implemented as an OWL ontology with SWRL rules, enabling the use of an off-the-shelf reasoner for diagnostics and adaptation. The method is discussed and evaluated using two case studies of real, ROS-based systems: (i) for an autonomous dual arm mobile manipulator building a pyramid and (ii) a mobile robot navigating in a factory environment.