 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMROS: A framework for robot self-adaptation
Mar 16, 2023Self-adaptation can be used in robotics to increase system robustness and reliability. This work describes the Metacontrol method for self-adaptation in robotics. Particularly, it details how the MROS (Metacontrol for ROS Systems) framework implements and packages Metacontrol, and it demonstrate how MROS can be applied in a navigation scenario where a mobile robot navigates in a factory floor. Video: https://www.youtube.com/watch?v=ISe9aMskJuE
Context-based navigation for ground mobile robot in a semi-structured indoor environment
Nov 23, 2021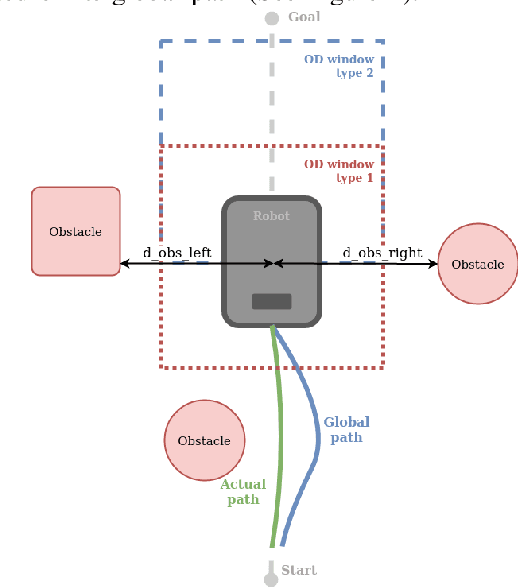
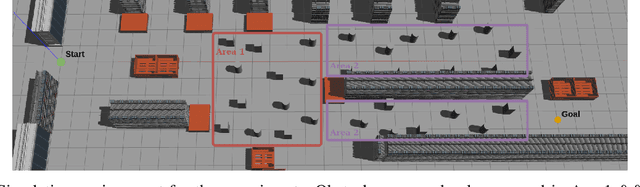

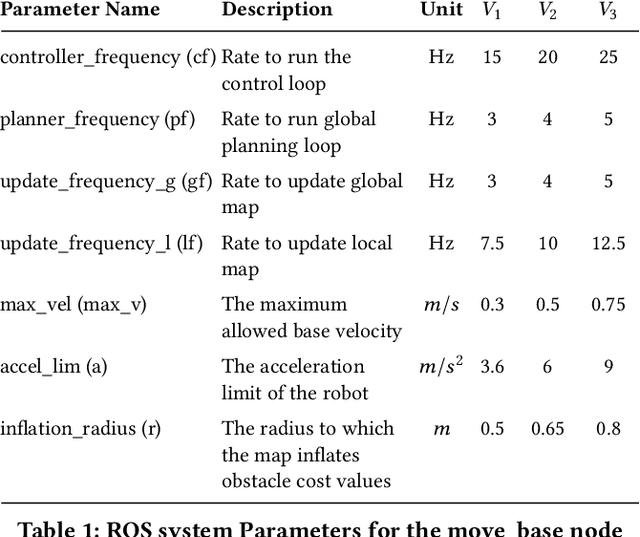
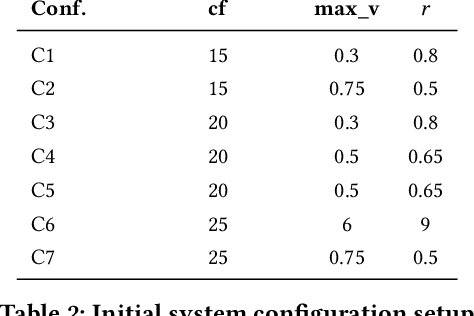
There is a growing demand for mobile robots to operate in more variable environments, where guaranteeing safe robot navigation is a priority, in addition to time performance. To achieve this, current solutions for local planning use a specific configuration tuned to the characteristics of the application environment. In this paper, we present an approach for developing quality models that can be used by a self-adaptation framework to adapt the local planner configuration at run-time based on the perceived environment. We contribute a definition of a safety model that predicts the safety of a navigation configuration given the perceived environment. Experiments have been performed in a realistic navigation scenario for a retail application to validate the obtained models and demonstrate their integration in a self-adaptation framework.
MROS: Runtime Adaptation For Robot Control Architectures
Oct 19, 2020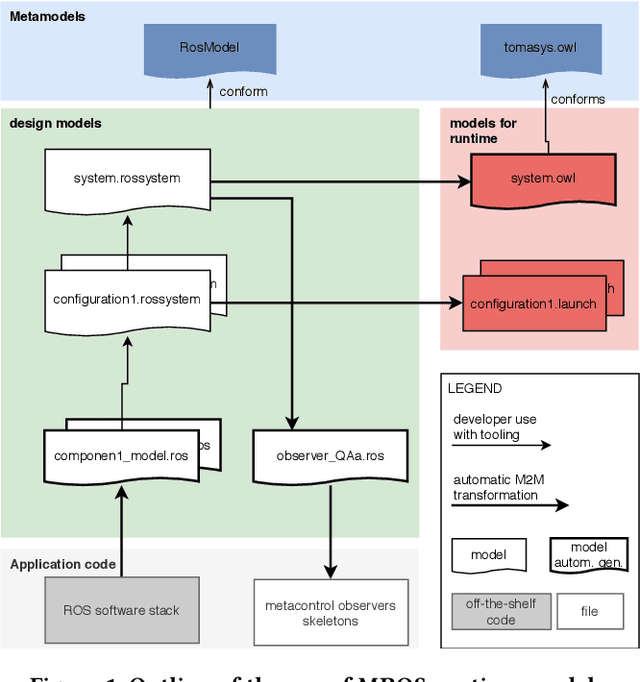

Known attempts to build autonomous robots rely on complex control architectures, often implemented with the Robot Operating System platform (ROS). These architectures need to be dynamically adaptable in order to cope with changing environment conditions, new mission requirements or component failures. The implementation of adaptable architectures is very often ad hoc, quickly gets cumbersome and expensive. We present a structured model-based framework for the adaptation of robot control architectures at run-time to satisfy set quality requirements. We use a formal meta-model to represent the configuration space of control architectures and the corresponding mission requirements. The meta-model is implemented as an OWL ontology with SWRL rules, enabling the use of an off-the-shelf reasoner for diagnostics and adaptation. The method is discussed and evaluated using two case studies of real, ROS-based systems: (i) for an autonomous dual arm mobile manipulator building a pyramid and (ii) a mobile robot navigating in a factory environment.