 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarmCoDe: A Scalable Co-Design Framework for Heterogeneous Robot Swarms via Dynamic Speciation
Mar 27, 2026Robot swarms offer inherent robustness and the capacity to execute complex, collaborative tasks surpassing the capabilities of single-agent systems. Co-designing these systems is critical, as marginal improvements in individual performance or unit cost compound significantly at scale. However, under traditional frameworks, this scale renders co-design intractable due to exponentially large, non-intuitive design spaces. To address this, we propose SwarmCoDe, a novel Collaborative Co-Evolutionary Algorithm (CCEA) that utilizes dynamic speciation to automatically scale swarm heterogeneity to match task complexity. Inspired by biological signaling mechanisms for inter-species cooperation, the algorithm uses evolved genetic tags and a selectivity gene to facilitate the emergent identification of symbiotically beneficial partners without predefined species boundaries. Additionally, an evolved dominance gene dictates the relative swarm composition, decoupling the physical swarm size from the evolutionary population. We apply SwarmCoDe to simultaneously optimize task planning and hardware morphology under fabrication budgets, successfully evolving specialized swarms of up to 200 agents -- four times the size of the evolutionary population. This framework provides a scalable, computationally viable pathway for the holistic co-design of large-scale, heterogeneous robot swarms.
Swim2Real: VLM-Guided System Identification for Sim-to-Real Transfer
Mar 21, 2026We present Swim2Real, a pipeline that calibrates a 16-parameter robotic fish simulator from swimming videos using vision-language model (VLM) feedback, requiring no hand-designed search stages. Calibrating soft aquatic robots is particularly challenging because nonlinear fluid-structure coupling makes the parameter landscape chaotic, simplified fluid models introduce a persistent sim-to-real gap, and controlled aquatic experiments are difficult to reproduce. Prior work on this platform required three manually tailored stages to handle this complexity. The VLM compares simulated and real videos and proposes parameter updates. A backtracking line search then validates each step size, tripling the accept rate from 14% to 42% by recovering proposals where the direction is correct but the magnitude is too large. Swim2Real calibrates all 16 parameters simultaneously, most closely matching real fish velocities across all motor frequencies (MAE = 7.4 mm/s, 43% lower than the next-best method), with zero outlier seeds across five runs. Motor commands from the trained policy transfer to the physical fish at 50 Hz, completing the pipeline from swimming video to real-world deployment. Downstream RL policies swim 12% farther than those from BayesOpt-calibrated simulators and 90% farther than CMA-ES. These results demonstrate that VLM-guided calibration can close the sim-to-real gap for aquatic robots directly from video, enabling zero-shot RL transfer to physical swimmers without manual system identification, a step toward automated, general-purpose simulator tuning for underwater robotics.
Tendon Force Modeling for Sim2Real Transfer of Reinforcement Learning Policies for Tendon-Driven Robots
Mar 04, 2026Robots which make use of soft or compliant inter- actions often leverage tendon-driven actuation which enables actuators to be placed more flexibly, and compliance to be maintained. However, controlling complex tendon systems is challenging. Simulation paired with reinforcement learning (RL) could be enable more complex behaviors to be generated. Such methods rely on torque and force-based simulation roll- outs which are limited by the sim-to-real gap, stemming from the actuator and system dynamics, resulting in poor transfer of RL policies onto real robots. To address this, we propose a method to model the tendon forces produced by typical servo motors, focusing specifically on the transfer of RL policies for a tendon driven finger. Our approach extends existing data- driven techniques by leveraging contextual history and a novel data collection test-bench. This test-bench allows us to capture tendon forces undergo contact-rich interactions typical of real- world manipulation. We then utilize our force estimation model in a GPU-accelerated tendon force-driven rigid body simulation to train RL-based controllers. Our transformer-based model is capable of predicting tendon forces within 3% of the maximum motor force and is robot-agnostic. By integrating our learned model into simulation, we reduce the sim-to-real gap for test trajectories by 41%. RL-based controller trained with our model achieves a 50% improvement in fingertip pose tracking tasks on real tendon-driven robotic fingers. This approach is generalizable to different actuators and robot systems, and can enable RL policies to be used widely across tendon systems, advancing capabilities of dexterous manipulators and soft robots.
Simple Models, Real Swimming: Digital Twins for Tendon-Driven Underwater Robots
Feb 26, 2026Mimicking the graceful motion of swimming animals remains a core challenge in soft robotics due to the complexity of fluid-structure interaction and the difficulty of controlling soft, biomimetic bodies. Existing modeling approaches are often computationally expensive and impractical for complex control or reinforcement learning needed for realistic motions to emerge in robotic systems. In this work, we present a tendon-driven fish robot modeled in an efficient underwater swimmer environment using a simplified, stateless hydrodynamics formulation implemented in the widespread robotics framework MuJoCo. With just two real-world swimming trajectories, we identify five fluid parameters that allow a matching to experimental behavior and generalize across a range of actuation frequencies. We show that this stateless fluid model can generalize to unseen actuation and outperform classical analytical models such as the elongated body theory. This simulation environment runs faster than real-time and can easily enable downstream learning algorithms such as reinforcement learning for target tracking, reaching a 93% success rate. Due to the simplicity and ease of use of the model and our open-source simulation environment, our results show that even simple, stateless models -- when carefully matched to physical data -- can serve as effective digital twins for soft underwater robots, opening up new directions for scalable learning and control in aquatic environments.
Vid2Sid: Videos Can Help Close the Sim2Real Gap
Feb 22, 2026Calibrating a robot simulator's physics parameters (friction, damping, material stiffness) to match real hardware is often done by hand or with black-box optimizers that reduce error but cannot explain which physical discrepancies drive the error. When sensing is limited to external cameras, the problem is further compounded by perception noise and the absence of direct force or state measurements. We present Vid2Sid, a video-driven system identification pipeline that couples foundation-model perception with a VLM-in-the-loop optimizer that analyzes paired sim-real videos, diagnoses concrete mismatches, and proposes physics parameter updates with natural language rationales. We evaluate our approach on a tendon-actuated finger (rigid-body dynamics in MuJoCo) and a deformable continuum tentacle (soft-body dynamics in PyElastica). On sim2real holdout controls unseen during training, Vid2Sid achieves the best average rank across all settings, matching or exceeding black-box optimizers while uniquely providing interpretable reasoning at each iteration. Sim2sim validation confirms that Vid2Sid recovers ground-truth parameters most accurately (mean relative error under 13\% vs. 28--98\%), and ablation analysis reveals three calibration regimes. VLM-guided optimization excels when perception is clean and the simulator is expressive, while model-class limitations bound performance in more challenging settings.
A Survey on Soft Robot Adaptability: Implementations, Applications, and Prospects
Jun 24, 2025Soft robots, compared to rigid robots, possess inherent advantages, including higher degrees of freedom, compliance, and enhanced safety, which have contributed to their increasing application across various fields. Among these benefits, adaptability is particularly noteworthy. In this paper, adaptability in soft robots is categorized into external and internal adaptability. External adaptability refers to the robot's ability to adjust, either passively or actively, to variations in environments, object properties, geometries, and task dynamics. Internal adaptability refers to the robot's ability to cope with internal variations, such as manufacturing tolerances or material aging, and to generalize control strategies across different robots. As the field of soft robotics continues to evolve, the significance of adaptability has become increasingly pronounced. In this review, we summarize various approaches to enhancing the adaptability of soft robots, including design, sensing, and control strategies. Additionally, we assess the impact of adaptability on applications such as surgery, wearable devices, locomotion, and manipulation. We also discuss the limitations of soft robotics adaptability and prospective directions for future research. By analyzing adaptability through the lenses of implementation, application, and challenges, this paper aims to provide a comprehensive understanding of this essential characteristic in soft robotics and its implications for diverse applications.
8-DoFs Cable Driven Parallel Robots for Bimanual Teleportation
Apr 02, 2025



Teleoperation plays a critical role in intuitive robot control and imitation learning, particularly for complex tasks involving mobile manipulators with redundant degrees of freedom (DoFs). However, most existing master controllers are limited to 6-DoF spatial control and basic gripper control, making them insufficient for controlling high-DoF robots and restricting the operator to a small workspace. In this work, we present a novel, low-cost, high-DoF master controller based on Cable-Driven Parallel Robots (CDPRs), designed to overcome these limitations. The system decouples translation and orientation control, following a scalable 3 + 3 + n DoF structure: 3 DoFs for large-range translation using a CDPR, 3 DoFs for orientation using a gimbal mechanism, and n additional DoFs for gripper and redundant joint control. Its lightweight cable-driven design enables a large and adaptable workspace while minimizing actuator load. The end-effector remains stable without requiring continuous high-torque input, unlike most serial robot arms. We developed the first dual-arm CDPR-based master controller using cost-effective actuators and a simple mechanical structure. In demonstrations, the system successfully controlled an 8-DoF robotic arm with a 2-DoF pan-tilt camera, performing tasks such as pick-and-place, knot tying, object sorting, and tape application. The results show precise, versatile, and practical high-DoF teleoperation.
Control the Soft Robot Arm with its Physical Twin
Mar 21, 2025



To exploit the compliant capabilities of soft robot arms we require controller which can exploit their physical capabilities. Teleoperation, leveraging a human in the loop, is a key step towards achieving more complex control strategies. Whilst teleoperation is widely used for rigid robots, for soft robots we require teleoperation methods where the configuration of the whole body is considered. We propose a method of using an identical 'physical twin', or demonstrator of the robot. This tendon robot can be back-driven, with the tendon lengths providing configuration perception, and enabling a direct mapping of tendon lengths for the execture. We demonstrate how this teleoperation across the entire configuration of the robot enables complex interactions with exploit the envrionment, such as squeezing into gaps. We also show how this method can generalize to robots which are a larger scale that the physical twin, and how, tuneability of the stiffness properties of the physical twin simplify its use.
Online Imitation Learning for Manipulation via Decaying Relative Correction through Teleoperation
Mar 19, 2025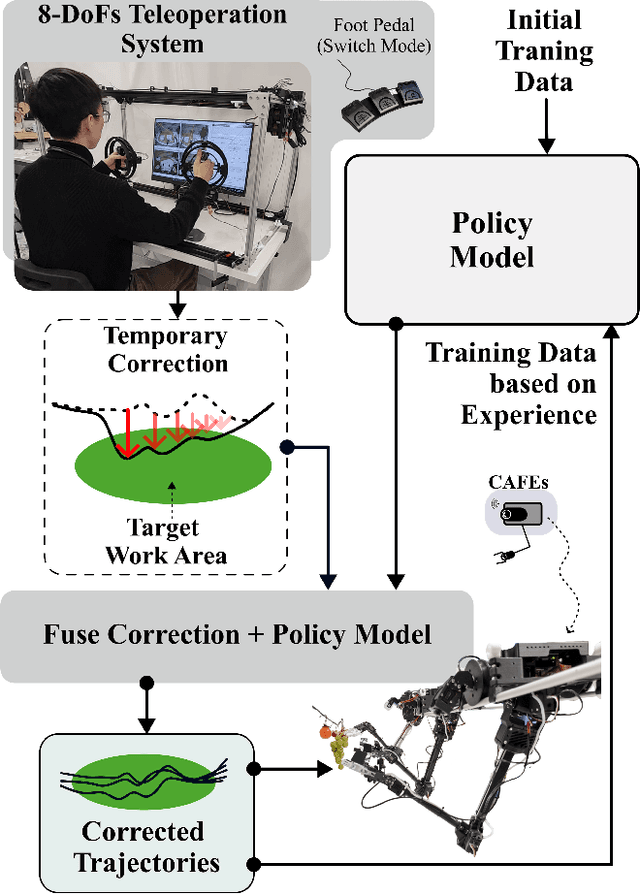
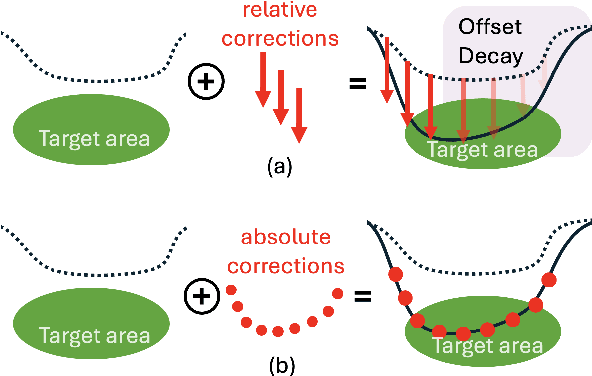
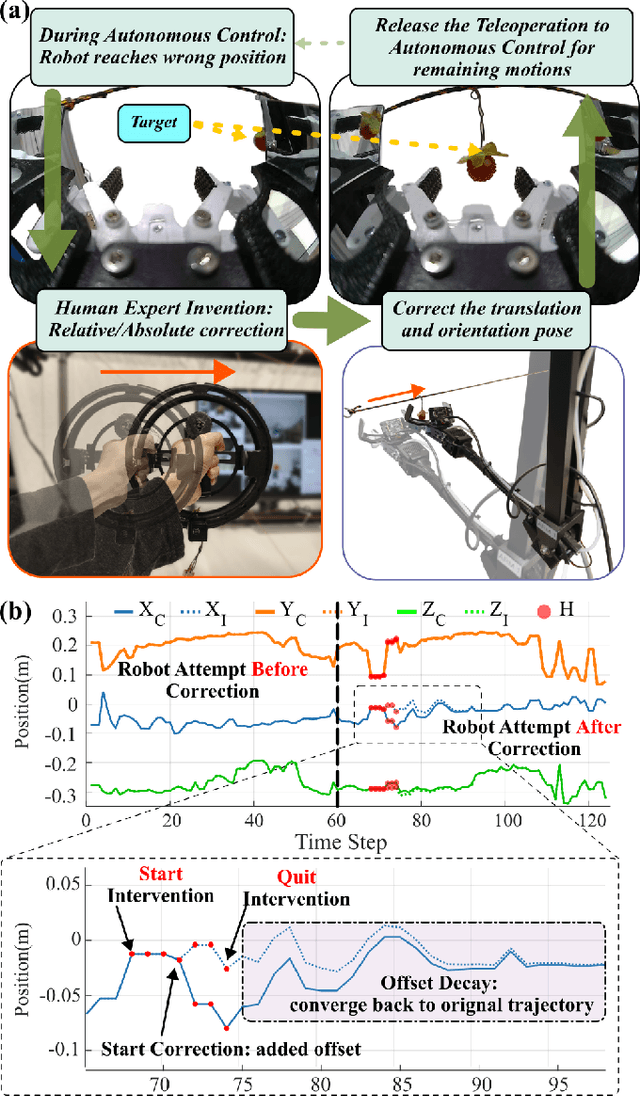
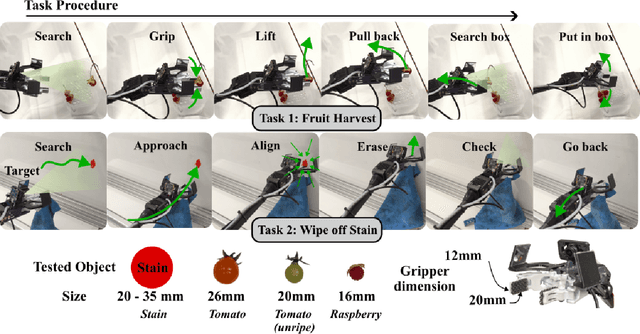
Teleoperated robotic manipulators enable the collection of demonstration data, which can be used to train control policies through imitation learning. However, such methods can require significant amounts of training data to develop robust policies or adapt them to new and unseen tasks. While expert feedback can significantly enhance policy performance, providing continuous feedback can be cognitively demanding and time-consuming for experts. To address this challenge, we propose to use a cable-driven teleoperation system which can provide spatial corrections with 6 degree of freedom to the trajectories generated by a policy model. Specifically, we propose a correction method termed Decaying Relative Correction (DRC) which is based upon the spatial offset vector provided by the expert and exists temporarily, and which reduces the intervention steps required by an expert. Our results demonstrate that DRC reduces the required expert intervention rate by 30\% compared to a standard absolute corrective method. Furthermore, we show that integrating DRC within an online imitation learning framework rapidly increases the success rate of manipulation tasks such as raspberry harvesting and cloth wiping.
Embodied Manipulation with Past and Future Morphologies through an Open Parametric Hand Design
Oct 24, 2024A human-shaped robotic hand offers unparalleled versatility and fine motor skills, enabling it to perform a broad spectrum of tasks with precision, power and robustness. Across the paleontological record and animal kingdom we see a wide range of alternative hand and actuation designs. Understanding the morphological design space and the resulting emergent behaviors can not only aid our understanding of dexterous manipulation and its evolution, but also assist design optimization, achieving, and eventually surpassing human capabilities. Exploration of hand embodiment has to date been limited by inaccessibility of customizable hands in the real-world, and by the reality gap in simulation of complex interactions. We introduce an open parametric design which integrates techniques for simplified customization, fabrication, and control with design features to maximize behavioral diversity. Non-linear rolling joints, anatomical tendon routing, and a low degree-of-freedom, modulating, actuation system, enable rapid production of single-piece 3D printable hands without compromising dexterous behaviors. To demonstrate this, we evaluated the design's low-level behavior range and stability, showing variable stiffness over two orders of magnitude. Additionally, we fabricated three hand designs: human, mirrored human with two thumbs, and aye-aye hands. Manipulation tests evaluate the variation in each hand's proficiency at handling diverse objects, and demonstrate emergent behaviors unique to each design. Overall, we shed light on new possible designs for robotic hands, provide a design space to compare and contrast different hand morphologies and structures, and share a practical and open-source design for exploring embodied manipulation.