 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Soft Robot Adaptability: Implementations, Applications, and Prospects
Jun 24, 2025Soft robots, compared to rigid robots, possess inherent advantages, including higher degrees of freedom, compliance, and enhanced safety, which have contributed to their increasing application across various fields. Among these benefits, adaptability is particularly noteworthy. In this paper, adaptability in soft robots is categorized into external and internal adaptability. External adaptability refers to the robot's ability to adjust, either passively or actively, to variations in environments, object properties, geometries, and task dynamics. Internal adaptability refers to the robot's ability to cope with internal variations, such as manufacturing tolerances or material aging, and to generalize control strategies across different robots. As the field of soft robotics continues to evolve, the significance of adaptability has become increasingly pronounced. In this review, we summarize various approaches to enhancing the adaptability of soft robots, including design, sensing, and control strategies. Additionally, we assess the impact of adaptability on applications such as surgery, wearable devices, locomotion, and manipulation. We also discuss the limitations of soft robotics adaptability and prospective directions for future research. By analyzing adaptability through the lenses of implementation, application, and challenges, this paper aims to provide a comprehensive understanding of this essential characteristic in soft robotics and its implications for diverse applications.
Control the Soft Robot Arm with its Physical Twin
Mar 21, 2025



To exploit the compliant capabilities of soft robot arms we require controller which can exploit their physical capabilities. Teleoperation, leveraging a human in the loop, is a key step towards achieving more complex control strategies. Whilst teleoperation is widely used for rigid robots, for soft robots we require teleoperation methods where the configuration of the whole body is considered. We propose a method of using an identical 'physical twin', or demonstrator of the robot. This tendon robot can be back-driven, with the tendon lengths providing configuration perception, and enabling a direct mapping of tendon lengths for the execture. We demonstrate how this teleoperation across the entire configuration of the robot enables complex interactions with exploit the envrionment, such as squeezing into gaps. We also show how this method can generalize to robots which are a larger scale that the physical twin, and how, tuneability of the stiffness properties of the physical twin simplify its use.
S2C2A: A Flexible Task Space Planning and Control Strategy for Modular Soft Robot Arms
Oct 04, 2024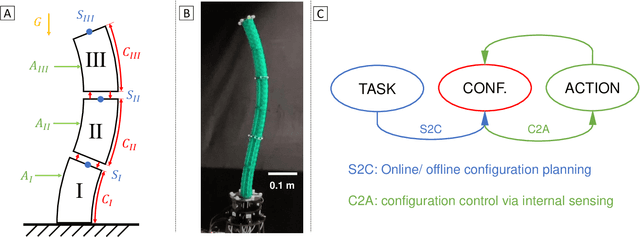
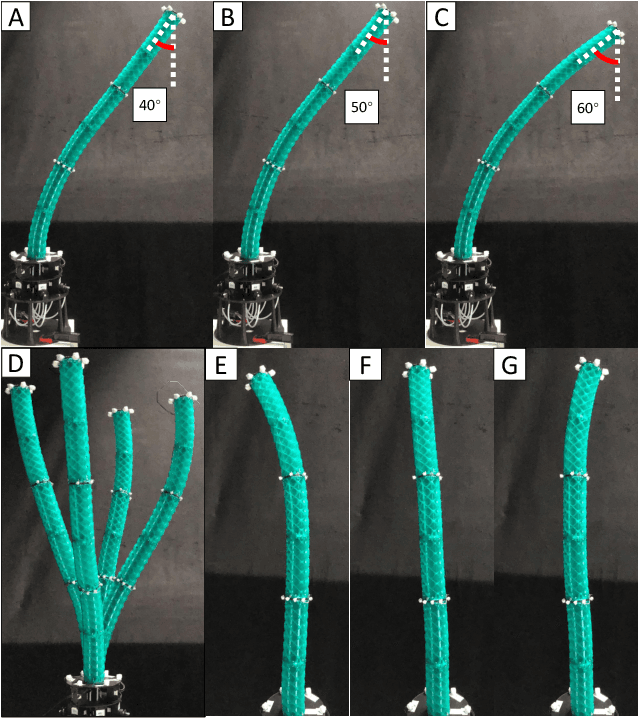
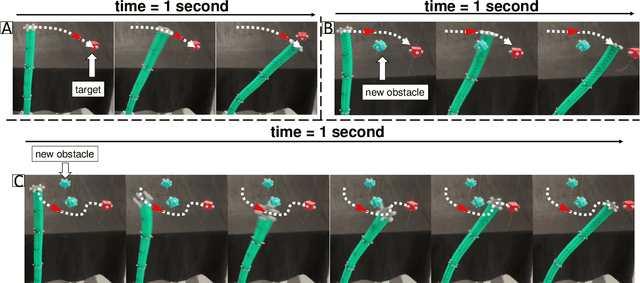
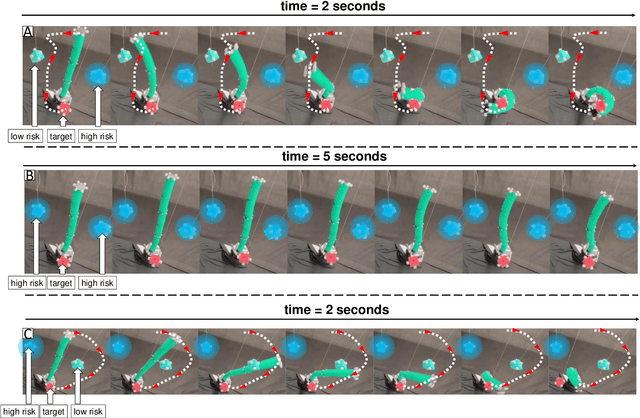
Modular soft robot arms (MSRAs) are composed of multiple independent modules connected in a sequence. Due to their modular structure and high degrees of freedom (DOFs), these modules can simultaneously bend at different angles in various directions, enabling complex deformation. This capability allows MSRAs to perform more intricate tasks than single module robots. However, the modular structure also induces challenges in accurate planning, modeling, and control. Nonlinearity, hysteresis, and gravity complicate the physical model, while the modular structure and increased DOFs further lead to accumulative errors along the sequence. To address these challenges, we propose a flexible task space planning and control strategy for MSRAs, named S2C2A (State to Configuration to Action). Our approach formulates an optimization problem, S2C (State to Configuration planning), which integrates various loss functions and a forward MSRA model to generate configuration trajectories based on target MSRA states. Given the model complexity, we leverage a biLSTM network as the forward model. Subsequently, a configuration controller C2A (Configuration to Action control) is implemented to follow the planned configuration trajectories, leveraging only inaccurate internal sensing feedback. Both a biLSTM network and a physical model are utilized for configuration control. We validated our strategy using a cable-driven MSRA, demonstrating its ability to perform diverse offline tasks such as position control, orientation control, and obstacle avoidance. Furthermore, our strategy endows MSRA with online interaction capability with targets and obstacles. Future work will focus on addressing MSRA challenges, such as developing more accurate physical models and reducing configuration estimation errors along the module sequence.
CityGPT: Towards Urban IoT Learning, Analysis and Interaction with Multi-Agent System
May 23, 2024



The spatiotemporal data generated by massive sensors in the Internet of Things (IoT) is extremely dynamic, heterogeneous, large scale and time-dependent. It poses great challenges (e.g. accuracy, reliability, and stability) in real-time analysis and decision making for different IoT applications. The complexity of IoT data prevents the common people from gaining a deeper understanding of it. Agentized systems help address the lack of data insight for the common people. We propose a generic framework, namely CityGPT, to facilitate the learning and analysis of IoT time series with an end-to-end paradigm. CityGPT employs three agents to accomplish the spatiotemporal analysis of IoT data. The requirement agent facilitates user inputs based on natural language. Then, the analysis tasks are decomposed into temporal and spatial analysis processes, completed by corresponding data analysis agents (temporal and spatial agents). Finally, the spatiotemporal fusion agent visualizes the system's analysis results by receiving analysis results from data analysis agents and invoking sub-visualization agents, and can provide corresponding textual descriptions based on user demands. To increase the insight for common people using our framework, we have agnentized the framework, facilitated by a large language model (LLM), to increase the data comprehensibility. Our evaluation results on real-world data with different time dependencies show that the CityGPT framework can guarantee robust performance in IoT computing.
Piecewise Affine Curvature model: a reduced-order model for soft robot-environment interaction beyond PCC
Nov 18, 2022



Soft robot are celebrated for their propensity to enable compliant and complex robot-environment interactions. Soft robotic manipulators, or slender continuum structure robots have the potential to exploit these interactions to enable new exploration and manipulation capabilities and safe human-robot interactions. However, the interactions, or perturbations by external forces cause the soft structure to deform in an infinite degree of freedom (DOF) space. To control such system, reduced order models are needed; typically models consider piecewise sections of constant curvature although external forces often deform the structure out of the constant curvature hypothesis. In this work we perform an analysis of the trade-off between computational treatability and modelling accuracy. We then propose a new kinematic model, the Piecewise Affine Curvature (PAC) which we validate theoretically and experimentally showing that this higher-order model better captures the configuration of a soft continuum body robot when perturbed by the external forces. In comparison to the current state of the art Piecewise Constant Curvature (PCC) model we demonstrate up to 30\% reduction in error for the end position of a soft continuum body robot.