 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-level RL-Heuristic Optimization for Real-world Winter Road Maintenance
Feb 27, 2026Winter road maintenance is critical for ensuring public safety and reducing environmental impacts, yet existing methods struggle to manage large-scale routing problems effectively and mostly reply on human decision. This study presents a novel, scalable bi-level optimization framework, validated on real operational data on UK strategic road networks (M25, M6, A1), including interconnected local road networks in surrounding areas for vehicle traversing, as part of the highway operator's efforts to solve existing planning challenges. At the upper level, a reinforcement learning (RL) agent strategically partitions the road network into manageable clusters and optimally allocates resources from multiple depots. At the lower level, a multi-objective vehicle routing problem (VRP) is solved within each cluster, minimizing the maximum vehicle travel time and total carbon emissions. Unlike existing approaches, our method handles large-scale, real-world networks efficiently, explicitly incorporating vehicle-specific constraints, depot capacities, and road segment requirements. Results demonstrate significant improvements, including balanced workloads, reduced maximum travel times below the targeted two-hour threshold, lower emissions, and substantial cost savings. This study illustrates how advanced AI-driven bi-level optimization can directly enhance operational decision-making in real-world transportation and logistics.
Distributed Virtual Model Control for Scalable Human-Robot Collaboration in Shared Workspace
Feb 19, 2026We present a decentralized, agent agnostic, and safety-aware control framework for human-robot collaboration based on Virtual Model Control (VMC). In our approach, both humans and robots are embedded in the same virtual-component-shaped workspace, where motion is the result of the interaction with virtual springs and dampers rather than explicit trajectory planning. A decentralized, force-based stall detector identifies deadlocks, which are resolved through negotiation. This reduces the probability of robots getting stuck in the block placement task from up to 61.2% to zero in our experiments. The framework scales without structural changes thanks to the distributed implementation: in experiments we demonstrate safe collaboration with up to two robots and two humans, and in simulation up to four robots, maintaining inter-agent separation at around 20 cm. Results show that the method shapes robot behavior intuitively by adjusting control parameters and achieves deadlock-free operation across team sizes in all tested scenarios.
Human Emotion-Mediated Soft Robotic Arts: Exploring the Intersection of Human Emotions, Soft Robotics and Arts
Feb 13, 2026Soft robotics has emerged as a versatile field with applications across various domains, from healthcare to industrial automation, and more recently, art and interactive installations. The inherent flexibility, adaptability, and safety of soft robots make them ideal for applications that require delicate, organic, and lifelike movement, allowing for immersive and responsive interactions. This study explores the intersection of human emotions, soft robotics, and art to establish and create new forms of human emotion-mediated soft robotic art. In this paper, we introduce two soft embodiments: a soft character and a soft flower as an art display that dynamically responds to brain signals based on alpha waves, reflecting different emotion levels. We present how human emotions can be measured as alpha waves based on brain/EEG signals, how we map the alpha waves to the dynamic movements of the two soft embodiments, and demonstrate our proposed concept using experiments. The findings of this study highlight how soft robotics can embody human emotional states, offering a new medium for insightful artistic expression and interaction, and demonstrating how art displays can be embodied.
Self-Closing Suction Grippers for Industrial Grasping via Form-Flexible Design
Jul 02, 2025Shape-morphing robots have shown benefits in industrial grasping. We propose form-flexible grippers for adaptive grasping. The design is based on the hybrid jamming and suction mechanism, which deforms to handle objects that vary significantly in size from the aperture, including both larger and smaller parts. Compared with traditional grippers, the gripper achieves self-closing to form an airtight seal. Under a vacuum, a wide range of grasping is realized through the passive morphing mechanism at the interface that harmonizes pressure and flow rate. This hybrid gripper showcases the capability to securely grasp an egg, as small as 54.5% of its aperture, while achieving a maximum load-to-mass ratio of 94.3.
Palpation Alters Auditory Pain Expressions with Gender-Specific Variations in Robopatients
Jun 13, 2025Diagnostic errors remain a major cause of preventable deaths, particularly in resource-limited regions. Medical training simulators, including robopatients, play a vital role in reducing these errors by mimicking real patients for procedural training such as palpation. However, generating multimodal feedback, especially auditory pain expressions, remains challenging due to the complex relationship between palpation behavior and sound. The high-dimensional nature of pain sounds makes exploration challenging with conventional methods. This study introduces a novel experimental paradigm for pain expressivity in robopatients where they dynamically generate auditory pain expressions in response to palpation force, by co-optimizing human feedback using machine learning. Using Proximal Policy Optimization (PPO), a reinforcement learning (RL) technique optimized for continuous adaptation, our robot iteratively refines pain sounds based on real-time human feedback. This robot initializes randomized pain responses to palpation forces, and the RL agent learns to adjust these sounds to align with human preferences. The results demonstrated that the system adapts to an individual's palpation forces and sound preferences and captures a broad spectrum of pain intensity, from mild discomfort to acute distress, through RL-guided exploration of the auditory pain space. The study further showed that pain sound perception exhibits saturation at lower forces with gender specific thresholds. These findings highlight the system's potential to enhance abdominal palpation training by offering a controllable and immersive simulation platform.
Auditory-Tactile Congruence for Synthesis of Adaptive Pain Expressions in RoboPatients
Jun 13, 2025Misdiagnosis can lead to delayed treatments and harm. Robotic patients offer a controlled way to train and evaluate clinicians in rare, subtle, or complex cases, reducing diagnostic errors. We present RoboPatient, a medical robotic simulator aimed at multimodal pain synthesis based on haptic and auditory feedback during palpation-based training scenarios. The robopatient functions as an adaptive intermediary, capable of synthesizing plausible pain expressions vocal and facial in response to tactile stimuli generated during palpation. Using an abdominal phantom, robopatient captures and processes haptic input via an internal palpation-to-pain mapping model. To evaluate perceptual congruence between palpation and the corresponding auditory output, we conducted a study involving 7680 trials across 20 participants, where they evaluated pain intensity through sound. Results show that amplitude and pitch significantly influence agreement with the robot's pain expressions, irrespective of pain sounds. Stronger palpation forces elicited stronger agreement, aligning with psychophysical patterns. The study revealed two key dimensions: pitch and amplitude are central to how people perceive pain sounds, with pitch being the most influential cue. These acoustic features shape how well the sound matches the applied force during palpation, impacting perceived realism. This approach lays the groundwork for high-fidelity robotic patients in clinical education and diagnostic simulation.
The Morphology-Control Trade-Off: Insights into Soft Robotic Efficiency
Mar 20, 2025Soft robotics holds transformative potential for enabling adaptive and adaptable systems in dynamic environments. However, the interplay between morphological and control complexities and their collective impact on task performance remains poorly understood. Therefore, in this study, we investigate these trade-offs across tasks of differing difficulty levels using four well-used morphological complexity metrics and control complexity measured by FLOPs. We investigate how these factors jointly influence task performance by utilizing the evolutionary robot experiments. Results show that optimal performance depends on the alignment between morphology and control: simpler morphologies and lightweight controllers suffice for easier tasks, while harder tasks demand higher complexities in both dimensions. In addition, a clear trade-off between morphological and control complexities that achieve the same task performance can be observed. Moreover, we also propose a sensitivity analysis to expose the task-specific contributions of individual morphological metrics. Our study establishes a framework for investigating the relationships between morphology, control, and task performance, advancing the development of task-specific robotic designs that balance computational efficiency with adaptability. This study contributes to the practical application of soft robotics in real-world scenarios by providing actionable insights.
Embodied Manipulation with Past and Future Morphologies through an Open Parametric Hand Design
Oct 24, 2024A human-shaped robotic hand offers unparalleled versatility and fine motor skills, enabling it to perform a broad spectrum of tasks with precision, power and robustness. Across the paleontological record and animal kingdom we see a wide range of alternative hand and actuation designs. Understanding the morphological design space and the resulting emergent behaviors can not only aid our understanding of dexterous manipulation and its evolution, but also assist design optimization, achieving, and eventually surpassing human capabilities. Exploration of hand embodiment has to date been limited by inaccessibility of customizable hands in the real-world, and by the reality gap in simulation of complex interactions. We introduce an open parametric design which integrates techniques for simplified customization, fabrication, and control with design features to maximize behavioral diversity. Non-linear rolling joints, anatomical tendon routing, and a low degree-of-freedom, modulating, actuation system, enable rapid production of single-piece 3D printable hands without compromising dexterous behaviors. To demonstrate this, we evaluated the design's low-level behavior range and stability, showing variable stiffness over two orders of magnitude. Additionally, we fabricated three hand designs: human, mirrored human with two thumbs, and aye-aye hands. Manipulation tests evaluate the variation in each hand's proficiency at handling diverse objects, and demonstrate emergent behaviors unique to each design. Overall, we shed light on new possible designs for robotic hands, provide a design space to compare and contrast different hand morphologies and structures, and share a practical and open-source design for exploring embodied manipulation.
Human-Robot Cooperative Piano Playing with Learning-Based Real-Time Music Accompaniment
Sep 18, 2024Recent advances in machine learning have paved the way for the development of musical and entertainment robots. However, human-robot cooperative instrument playing remains a challenge, particularly due to the intricate motor coordination and temporal synchronization. In this paper, we propose a theoretical framework for human-robot cooperative piano playing based on non-verbal cues. First, we present a music improvisation model that employs a recurrent neural network (RNN) to predict appropriate chord progressions based on the human's melodic input. Second, we propose a behavior-adaptive controller to facilitate seamless temporal synchronization, allowing the cobot to generate harmonious acoustics. The collaboration takes into account the bidirectional information flow between the human and robot. We have developed an entropy-based system to assess the quality of cooperation by analyzing the impact of different communication modalities during human-robot collaboration. Experiments demonstrate that our RNN-based improvisation can achieve a 93\% accuracy rate. Meanwhile, with the MPC adaptive controller, the robot could respond to the human teammate in homophony performances with real-time accompaniment. Our designed framework has been validated to be effective in allowing humans and robots to work collaboratively in the artistic piano-playing task.
A 'MAP' to find high-performing soft robot designs: Traversing complex design spaces using MAP-elites and Topology Optimization
Jul 10, 2024
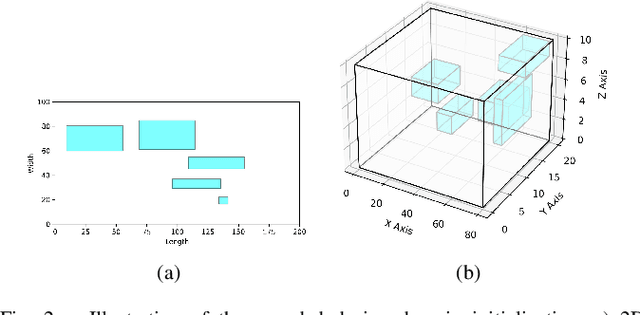
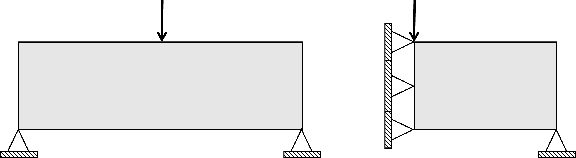
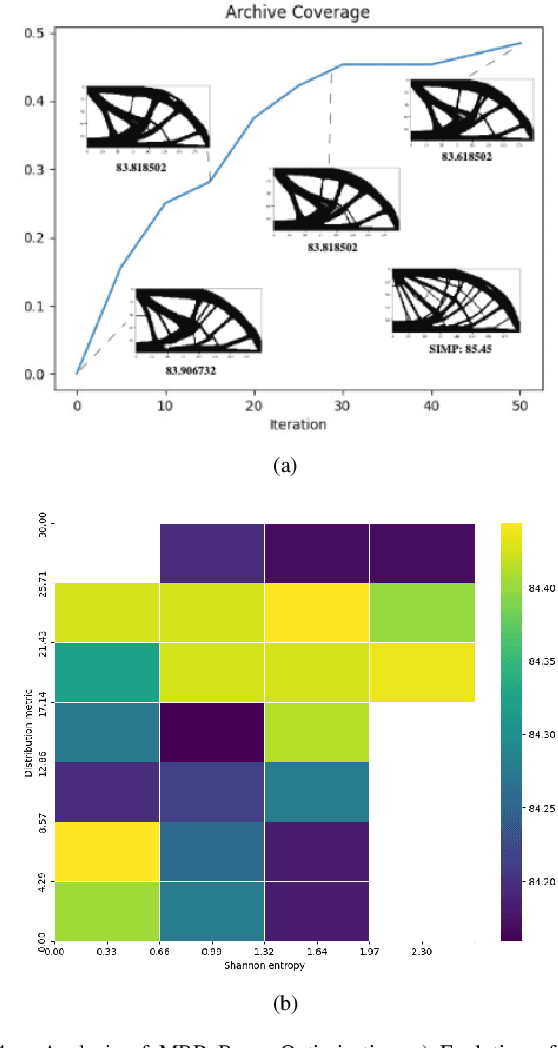
Soft robotics has emerged as the standard solution for grasping deformable objects, and has proven invaluable for mobile robotic exploration in extreme environments. However, despite this growth, there are no widely adopted computational design tools that produce quality, manufacturable designs. To advance beyond the diminishing returns of heuristic bio-inspiration, the field needs efficient tools to explore the complex, non-linear design spaces present in soft robotics, and find novel high-performing designs. In this work, we investigate a hierarchical design optimization methodology which combines the strengths of topology optimization and quality diversity optimization to generate diverse and high-performance soft robots by evolving the design domain. The method embeds variably sized void regions within the design domain and evolves their size and position, to facilitating a richer exploration of the design space and find a diverse set of high-performing soft robots. We demonstrate its efficacy on both benchmark topology optimization problems and soft robotic design problems, and show the method enhances grasp performance when applied to soft grippers. Our method provides a new framework to design parts in complex design domains, both soft and rigid.