 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Language-Action Model and Diffusion Policy Switching Enables Dexterous Control of an Anthropomorphic Hand
Oct 17, 2024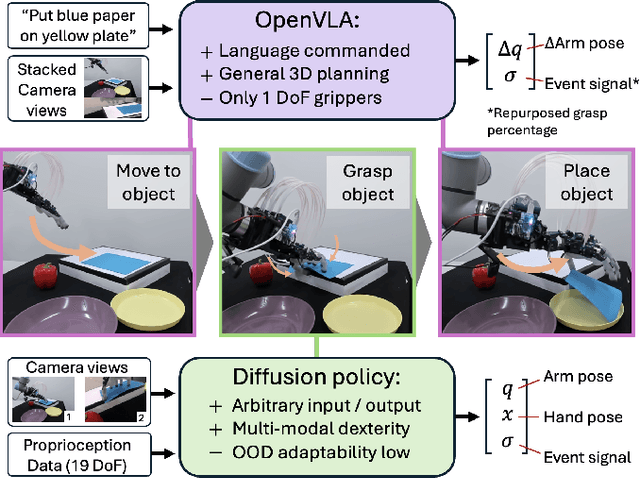
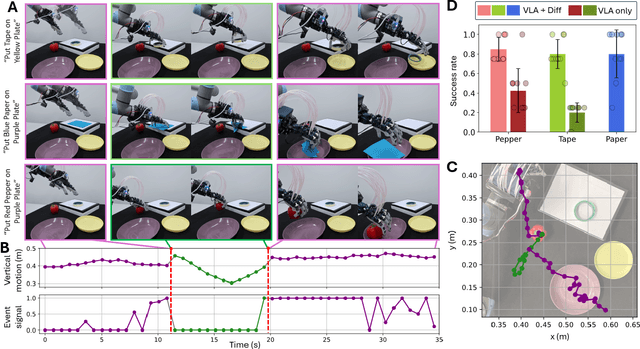
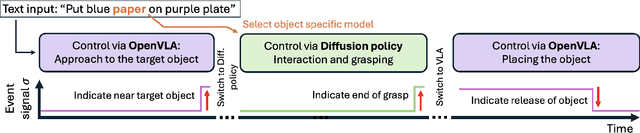
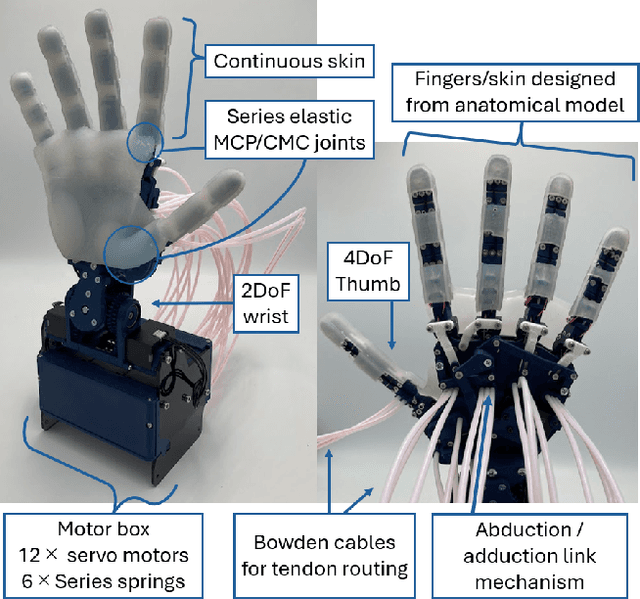
To advance autonomous dexterous manipulation, we propose a hybrid control method that combines the relative advantages of a fine-tuned Vision-Language-Action (VLA) model and diffusion models. The VLA model provides language commanded high-level planning, which is highly generalizable, while the diffusion model handles low-level interactions which offers the precision and robustness required for specific objects and environments. By incorporating a switching signal into the training-data, we enable event based transitions between these two models for a pick-and-place task where the target object and placement location is commanded through language. This approach is deployed on our anthropomorphic ADAPT Hand 2, a 13DoF robotic hand, which incorporates compliance through series elastic actuation allowing for resilience for any interactions: showing the first use of a multi-fingered hand controlled with a VLA model. We demonstrate this model switching approach results in a over 80\% success rate compared to under 40\% when only using a VLA model, enabled by accurate near-object arm motion by the VLA model and a multi-modal grasping motion with error recovery abilities from the diffusion model.
Robust Anthropomorphic Robotic Manipulation through Biomimetic Distributed Compliance
Apr 14, 2024The impressive capabilities of humans to robustly perform manipulation relies on compliant interactions, enabled through the structure and materials spatially distributed in our hands. We propose by mimicking this distributed compliance in an anthropomorphic robotic hand, the open-loop manipulation robustness increases and observe the emergence of human-like behaviours. To achieve this, we introduce the ADAPT Hand equipped with tunable compliance throughout the skin, fingers, and the wrist. Through extensive automated pick-and-place tests, we show the grasping robustness closely mirrors an estimated geometric theoretical limit, while `stress-testing' the robot hand to perform 800+ grasps. Finally, 24 items with largely varying geometries are grasped in a constrained environment with a success rate of 93%. We demonstrate the hand-object self-organization behavior underlines this extreme robustness, where the hand automatically exhibits different grasp types depending on object geometries. Furthermore, the robot grasp type mimics a natural human grasp with a direct similarity of 68%.
Control and Morphology Optimization of Passive Asymmetric Structures for Robotic Swimming
Nov 24, 2022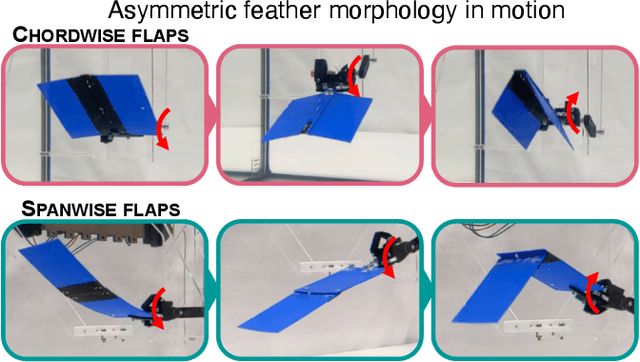
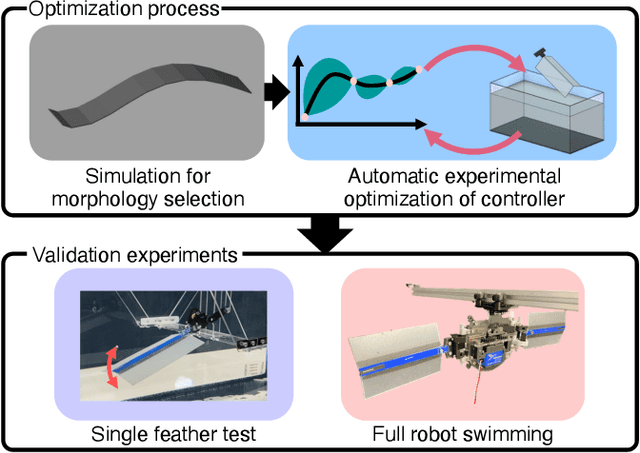
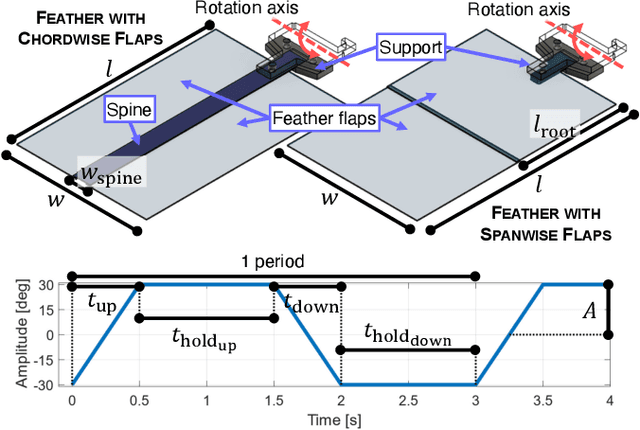
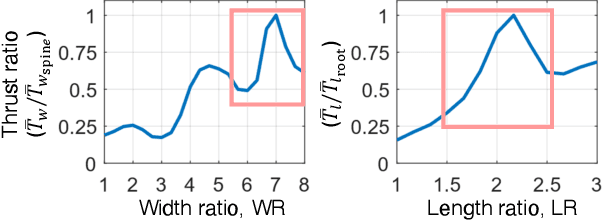
Aquatic creatures exhibit remarkable adaptations of their body to efficiently interact with the surrounding fluid. The tight coupling between their morphology, motion, and the environment are highly complex but serves as a valuable example when creating biomimetic structures in soft robotic swimmers. We focus on the use of asymmetry in structures to aid thrust generation and maneuverability. Designs of structures with asymmetric profiles are explored so that we can use morphology to `shape' the thrust generation. We propose combining simple simulation with automatic data-driven methods to explore their interactions with the fluid. The asymmetric structure with its co-optimized morphology and controller is able to produce 2.5 times the useful thrust compared to a baseline symmetric structure. Furthermore these asymmetric feather-like arms are validated on a robotic system capable of forward swimming motion while the same robot fitted with a plain feather is not able to move forward.