 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProprioceptive Sensing of Soft Tentacles with Model Based Reconstruction for Controller Optimization
Nov 24, 2022



The success of soft robots in displaying emergent behaviors is tightly linked to the compliant interaction with the environment. However, to exploit such phenomena, proprioceptive sensing methods which do not hinder their softness are needed. In this work we propose a new sensing approach for soft underwater slender structures based on embedded pressure sensors and use a learning-based pipeline to link the sensor readings to the shape of the soft structure. Using two different modeling techniques, we compare the pose reconstruction accuracy and identify the optimal approach. Using the proprioceptive sensing capabilities we show how this information can be used to assess the swimming performance over a number of metrics, namely swimming thrust, tip deflection, and the traveling wave index. We conclude by demonstrating the robustness of the embedded sensor on a free swimming soft robotic squid swimming at a maximum velocity of 9.5 cm/s, with the absolute tip deflection being predicted within an error less than 9% without the aid of external sensors.
Control and Morphology Optimization of Passive Asymmetric Structures for Robotic Swimming
Nov 24, 2022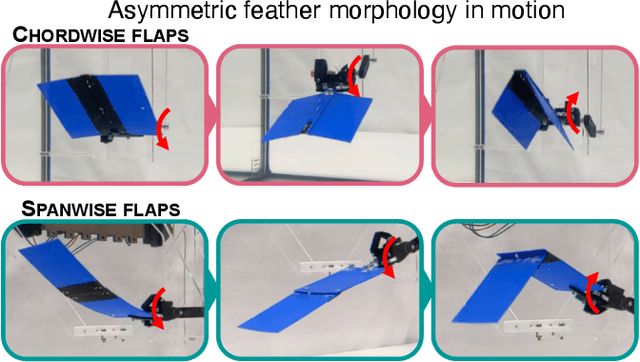
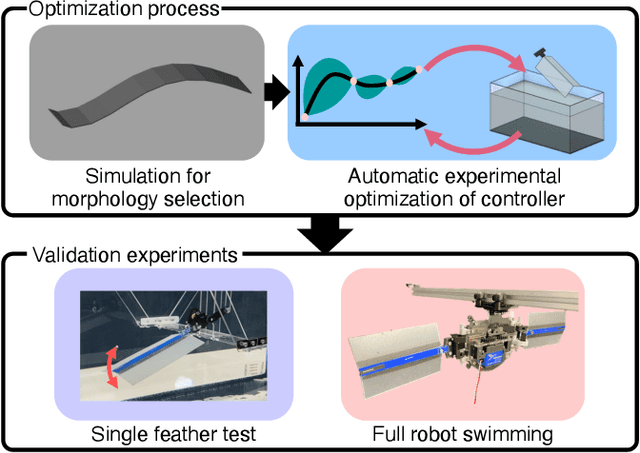
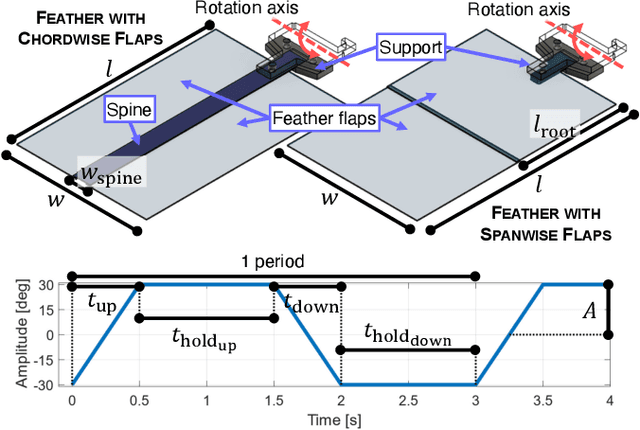
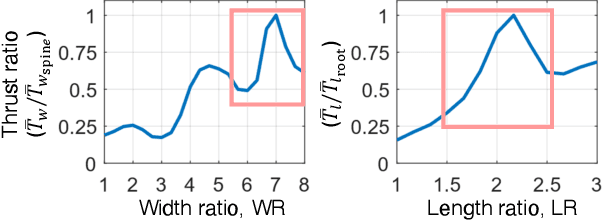
Aquatic creatures exhibit remarkable adaptations of their body to efficiently interact with the surrounding fluid. The tight coupling between their morphology, motion, and the environment are highly complex but serves as a valuable example when creating biomimetic structures in soft robotic swimmers. We focus on the use of asymmetry in structures to aid thrust generation and maneuverability. Designs of structures with asymmetric profiles are explored so that we can use morphology to `shape' the thrust generation. We propose combining simple simulation with automatic data-driven methods to explore their interactions with the fluid. The asymmetric structure with its co-optimized morphology and controller is able to produce 2.5 times the useful thrust compared to a baseline symmetric structure. Furthermore these asymmetric feather-like arms are validated on a robotic system capable of forward swimming motion while the same robot fitted with a plain feather is not able to move forward.