 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-Line Learning for Planning and Control of Underactuated Robots with Uncertain Dynamics
Jan 30, 2025



We present an iterative approach for planning and controlling motions of underactuated robots with uncertain dynamics. At its core, there is a learning process which estimates the perturbations induced by the model uncertainty on the active and passive degrees of freedom. The generic iteration of the algorithm makes use of the learned data in both the planning phase, which is based on optimization, and the control phase, where partial feedback linearization of the active dofs is performed on the model updated on-line. The performance of the proposed approach is shown by comparative simulations and experiments on a Pendubot executing various types of swing-up maneuvers. Very few iterations are typically needed to generate dynamically feasible trajectories and the tracking control that guarantees their accurate execution, even in the presence of large model uncertainties.
Nonlinear Modes as a Tool for Comparing the Mathematical Structure of Dynamic Models of Soft Robots
Feb 10, 2024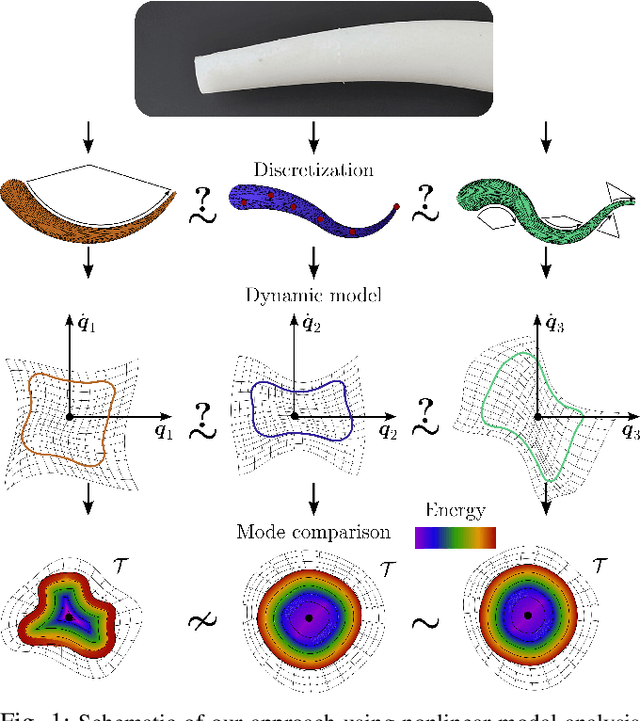



Continuum soft robots are nonlinear mechanical systems with theoretically infinite degrees of freedom (DoFs) that exhibit complex behaviors. Achieving motor intelligence under dynamic conditions necessitates the development of control-oriented reduced-order models (ROMs), which employ as few DoFs as possible while still accurately capturing the core characteristics of the theoretically infinite-dimensional dynamics. However, there is no quantitative way to measure if the ROM of a soft robot has succeeded in this task. In other fields, like structural dynamics or flexible link robotics, linear normal modes are routinely used to this end. Yet, this theory is not applicable to soft robots due to their nonlinearities. In this work, we propose to use the recent nonlinear extension in modal theory -- called eigenmanifolds -- as a means to evaluate control-oriented models for soft robots and compare them. To achieve this, we propose three similarity metrics relying on the projection of the nonlinear modes of the system into a task space of interest. We use this approach to compare quantitatively, for the first time, ROMs of increasing order generated under the piecewise constant curvature (PCC) hypothesis with a high-dimensional finite element (FE)-like model of a soft arm. Results show that by increasing the order of the discretization, the eigenmanifolds of the PCC model converge to those of the FE model.
Unified Inverse Dynamics of Modular Serial Mechanical Systems with Application to Soft Robotics
Feb 10, 2024



The robotic field has been witnessing a progressive departure from classic robotic systems composed of serial/stiff links interconnected by simple rigid joints. Novel robotic concepts, e.g., soft robots, often maintain a series-like structure, but their mechanical modules exhibit complex and unconventional articulation patterns. Research in efficient recursive formulations of the dynamic models for subclasses of these systems has been extremely active in the past decade. Yet, as of today, no single recursive inverse dynamics algorithm can describe the behavior of all these systems. This paper addresses this challenge by proposing a new iterative formulation based on Kane equations. Its computational complexity is optimal, i.e., linear with the number of modules. While the proposed formulation is not claimed to be necessarily more efficient than state-of-the-art techniques for specific subclasses of robots, we illustrate its usefulness in the modeling of different complex systems. We propose two new models of soft robots: (i) a class of pneumatically actuated soft arms that deform along their cross-sectional area, and (ii) a piecewise strain model with Gaussian functions.
On the Collocated Form with Input Decoupling of Lagrangian Systems
Jun 12, 2023Suitable representations of dynamical systems can simplify their analysis and control. On this line of thought, this paper considers the input decoupling problem for input-affine Lagrangian dynamics, namely the problem of finding a transformation of the generalized coordinates that decouples the input channels. We identify a class of systems for which this problem is solvable. Such systems are called collocated because the decoupling variables correspond to the coordinates on which the actuators directly perform work. Under mild conditions on the input matrix, a simple test is presented to verify whether a system is collocated or not. By exploiting power invariance, it is proven that a change of coordinates decouples the input channels if and only if the dynamics is collocated. We illustrate the theoretical results by considering several Lagrangian systems, focusing on underactuated mechanical systems, for which novel controllers that exploit input decoupling are designed.
Kinematic Control of Redundant Robots with Online Handling of Variable Generalized Hard Constraints
Feb 26, 2022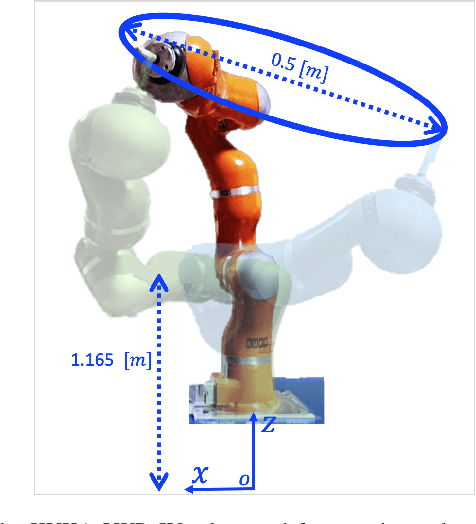
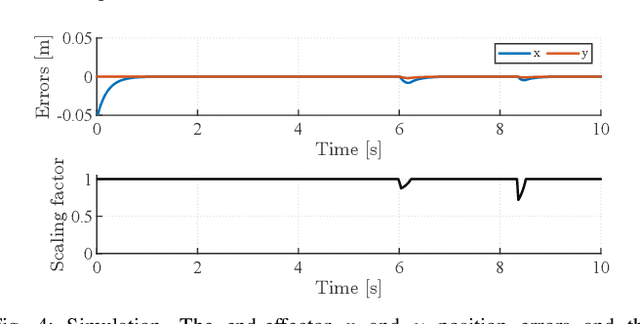
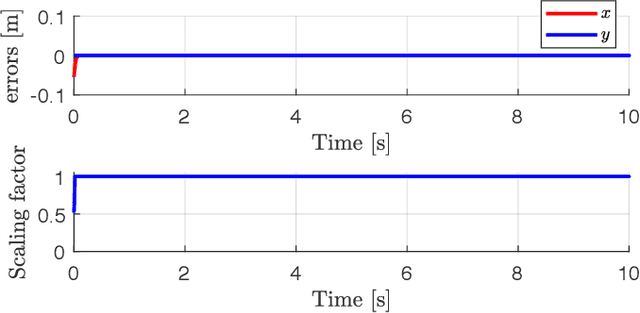
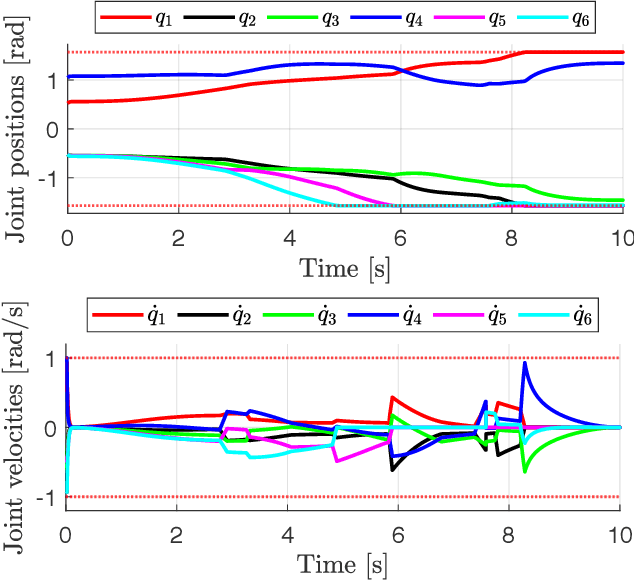
We present a generalized version of the Saturation in the Null Space (SNS) algorithm for the task control of redundant robots when hard inequality constraints are simultaneously present both in the joint and in the Cartesian space. These hard bounds should never be violated, are treated equally and in a unified way by the algorithm, and may also be varied, inserted or deleted online. When a joint/Cartesian bound saturates, the robot redundancy is exploited to continue fulfilling the primary task. If no feasible solution exists, an optimal scaling procedure is applied to enforce directional consistency with the original task. Simulation and experimental results on different robotic systems demonstrate the efficiency of the approach. The proposed algorithm can be viewed as a generic platform that is easily applicable to any robotic application in which robots operate in an unstructured environment and online handling of joint and Cartesian constraints is critical.
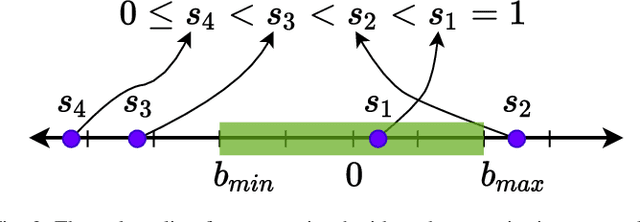
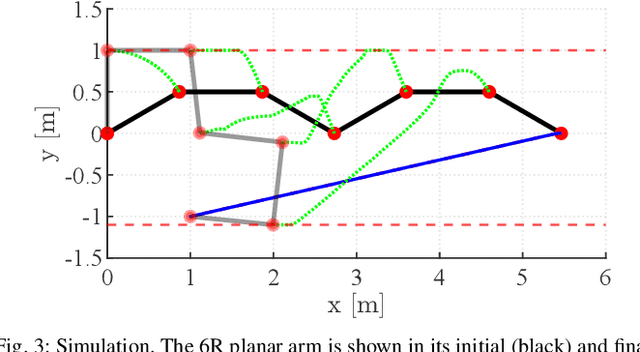
Motion Control of Redundant Robots with Generalised Inequality Constraints
Oct 04, 2021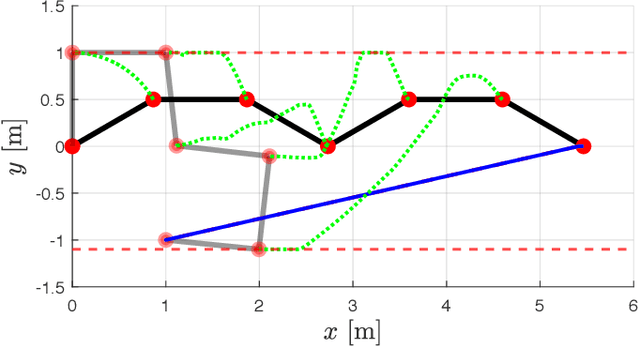
We present an improved version of the Saturation in the Null Space (SNS) algorithm for redundancy resolution at the velocity level. In addition to hard bounds on joint space motion, we consider also Cartesian box constraints that cannot be violated at any time. The modified algorithm combines all bounds into a single augmented generalised vector and gives equal, highest priority to all inequality constraints. When needed, feasibility of the original task is enforced by the SNS task scaling procedure. Simulation results are reported for a 6R planar robot.