 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-Line Learning for Planning and Control of Underactuated Robots with Uncertain Dynamics
Jan 30, 2025



We present an iterative approach for planning and controlling motions of underactuated robots with uncertain dynamics. At its core, there is a learning process which estimates the perturbations induced by the model uncertainty on the active and passive degrees of freedom. The generic iteration of the algorithm makes use of the learned data in both the planning phase, which is based on optimization, and the control phase, where partial feedback linearization of the active dofs is performed on the model updated on-line. The performance of the proposed approach is shown by comparative simulations and experiments on a Pendubot executing various types of swing-up maneuvers. Very few iterations are typically needed to generate dynamically feasible trajectories and the tracking control that guarantees their accurate execution, even in the presence of large model uncertainties.
An Efficient Real-Time NMPC for Quadrotor Position Control under Communication Time-Delay
Oct 23, 2020
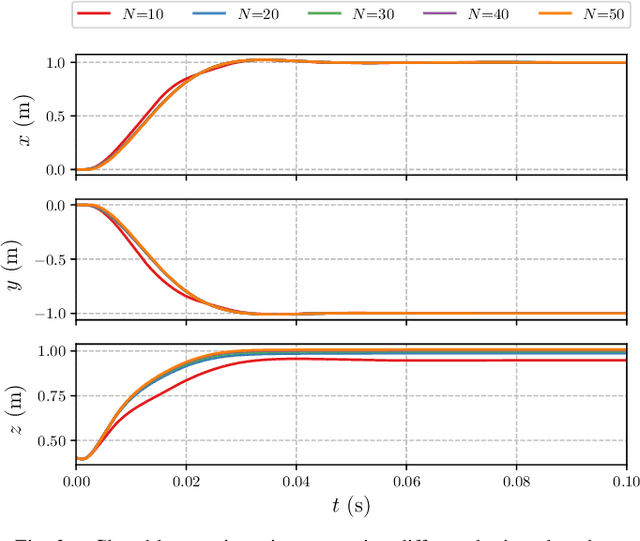

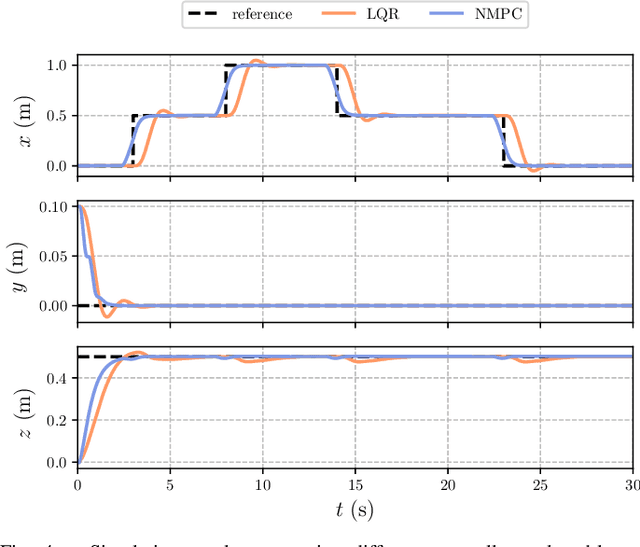
The advances in computer processor technology have enabled the application of nonlinear model predictive control (NMPC) to agile systems, such as quadrotors. These systems are characterized by their underactuation, nonlinearities, bounded inputs, and time-delays. Classical control solutions fall short in overcoming these difficulties and fully exploiting the capabilities offered by such platforms. This paper presents the design and implementation of an efficient position controller for quadrotors based on real-time NMPC with time-delay compensation and bounds enforcement on the actuators. To deal with the limited computational resources onboard, an offboard control architecture is proposed. It is implemented using the high-performance software package acados, which solves optimal control problems and implements a real-time iteration (RTI) variant of a sequential quadratic programming (SQP) scheme with Gauss-Newton Hessian approximation. The quadratic subproblems (QP) in the SQP scheme are solved with HPIPM, an interior-point method solver, built on top of the linear algebra library BLASFEO, finely tuned for multiple CPU architectures. Solution times are further reduced by reformulating the QPs using the efficient partial condensing algorithm implemented in HPIPM. We demonstrate the capabilities of our architecture using the Crazyflie 2.1 nano-quadrotor.
MPC for Humanoid Gait Generation: Stability and Feasibility
Jan 24, 2019



We present a novel MPC framework for humanoid gait generation which incorporates an explicit stability constraint in the formulation. The proposed method uses as prediction model a dynamically extended LIP where ZMP velocities are the control inputs, producing in real time a gait (including footsteps with the associated timing) that realizes omnidirectional motion commands coming from an external source. The stability constraint links the future ZMP velocities to the current system state so as to guarantee the essential requirement that the generated CoM trajectory is bounded with respect to the ZMP trajectory. Since the control horizon of the MPC algorithm is finite, only part of the future ZMP velocities are decision variables of the MPC problem; the remaining part, called tail, must be either conjectured or anticipated using preview information on the reference motion. Several possible options for the tail are discussed, and each of them is shown to correspond to a specific terminal constraint. The stability and feasibility of the proposed method are analyzed in detail: in particular, a theoretical analysis of the feasibility of the generic MPC iteration is developed and used to obtain sufficient conditions for recursive feasibility and stability. Simulation and experimental results on the NAO and the HRP-4 humanoids are presented to illustrate the performance of the proposed method.
Decentralized Multi-Robot Encirclement of a 3D Target with Guaranteed Collision Avoidance
Jun 19, 2015



We present a control framework for achieving encirclement of a target moving in 3D using a multi-robot system. Three variations of a basic control strategy are proposed for different versions of the encirclement problem, and their effectiveness is formally established. An extension ensuring maintenance of a safe inter-robot distance is also discussed. The proposed framework is fully decentralized and only requires local communication among robots; in particular, each robot locally estimates all the relevant global quantities. We validate the proposed strategy through simulations on kinematic point robots and quadrotor UAVs, as well as experiments on differential-drive wheeled mobile robots.
* Accepted for Autonomous Robots - Springer