 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-Line Learning for Planning and Control of Underactuated Robots with Uncertain Dynamics
Jan 30, 2025



We present an iterative approach for planning and controlling motions of underactuated robots with uncertain dynamics. At its core, there is a learning process which estimates the perturbations induced by the model uncertainty on the active and passive degrees of freedom. The generic iteration of the algorithm makes use of the learned data in both the planning phase, which is based on optimization, and the control phase, where partial feedback linearization of the active dofs is performed on the model updated on-line. The performance of the proposed approach is shown by comparative simulations and experiments on a Pendubot executing various types of swing-up maneuvers. Very few iterations are typically needed to generate dynamically feasible trajectories and the tracking control that guarantees their accurate execution, even in the presence of large model uncertainties.
Kinematic Control of Redundant Robots with Online Handling of Variable Generalized Hard Constraints
Feb 26, 2022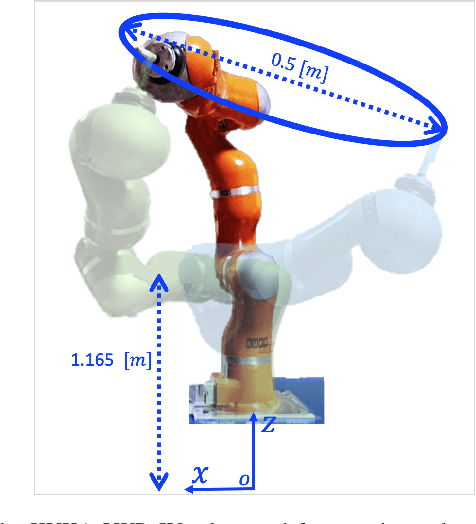
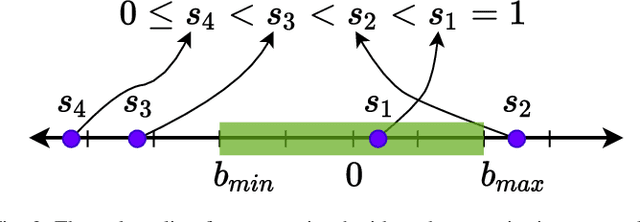
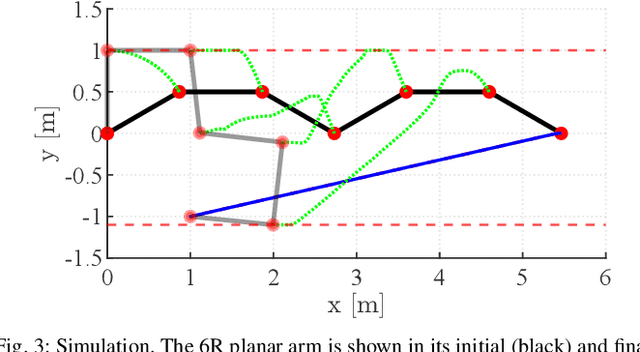
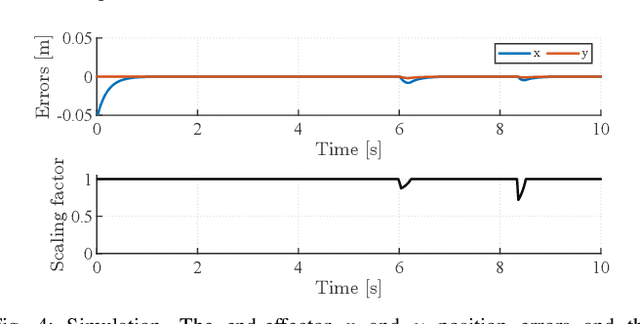
We present a generalized version of the Saturation in the Null Space (SNS) algorithm for the task control of redundant robots when hard inequality constraints are simultaneously present both in the joint and in the Cartesian space. These hard bounds should never be violated, are treated equally and in a unified way by the algorithm, and may also be varied, inserted or deleted online. When a joint/Cartesian bound saturates, the robot redundancy is exploited to continue fulfilling the primary task. If no feasible solution exists, an optimal scaling procedure is applied to enforce directional consistency with the original task. Simulation and experimental results on different robotic systems demonstrate the efficiency of the approach. The proposed algorithm can be viewed as a generic platform that is easily applicable to any robotic application in which robots operate in an unstructured environment and online handling of joint and Cartesian constraints is critical.