 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMPC for Humanoid Gait Generation: Stability and Feasibility
Jan 24, 2019



We present a novel MPC framework for humanoid gait generation which incorporates an explicit stability constraint in the formulation. The proposed method uses as prediction model a dynamically extended LIP where ZMP velocities are the control inputs, producing in real time a gait (including footsteps with the associated timing) that realizes omnidirectional motion commands coming from an external source. The stability constraint links the future ZMP velocities to the current system state so as to guarantee the essential requirement that the generated CoM trajectory is bounded with respect to the ZMP trajectory. Since the control horizon of the MPC algorithm is finite, only part of the future ZMP velocities are decision variables of the MPC problem; the remaining part, called tail, must be either conjectured or anticipated using preview information on the reference motion. Several possible options for the tail are discussed, and each of them is shown to correspond to a specific terminal constraint. The stability and feasibility of the proposed method are analyzed in detail: in particular, a theoretical analysis of the feasibility of the generic MPC iteration is developed and used to obtain sufficient conditions for recursive feasibility and stability. Simulation and experimental results on the NAO and the HRP-4 humanoids are presented to illustrate the performance of the proposed method.
Emergence of Consensus in a Multi-Robot Network: from Abstract Models to Empirical Validation
Jan 19, 2016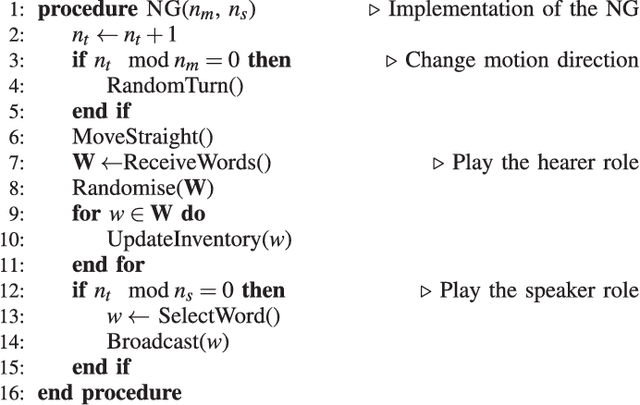
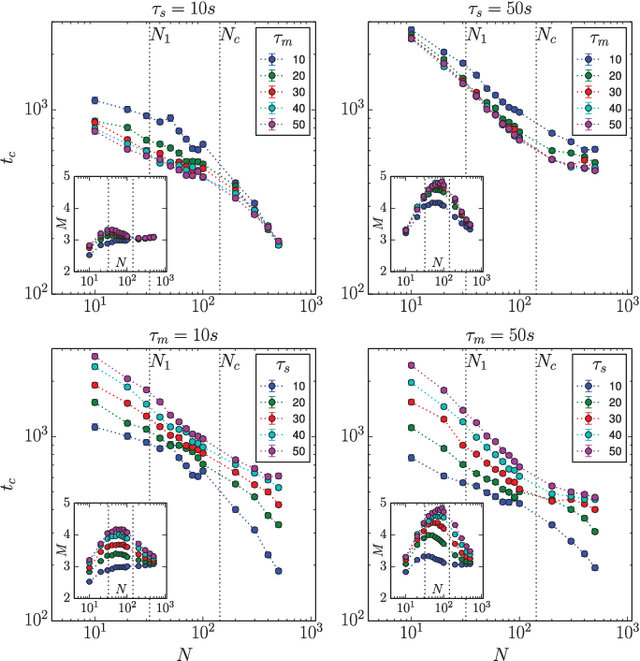
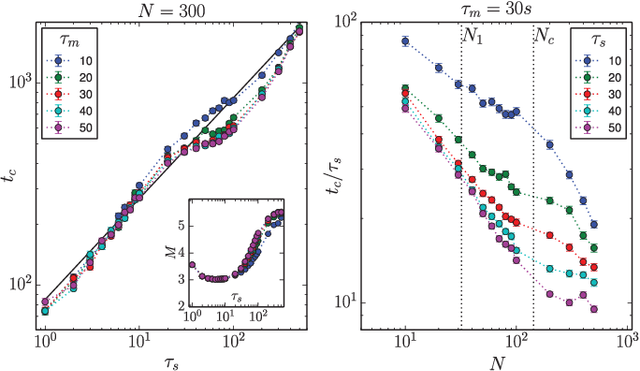
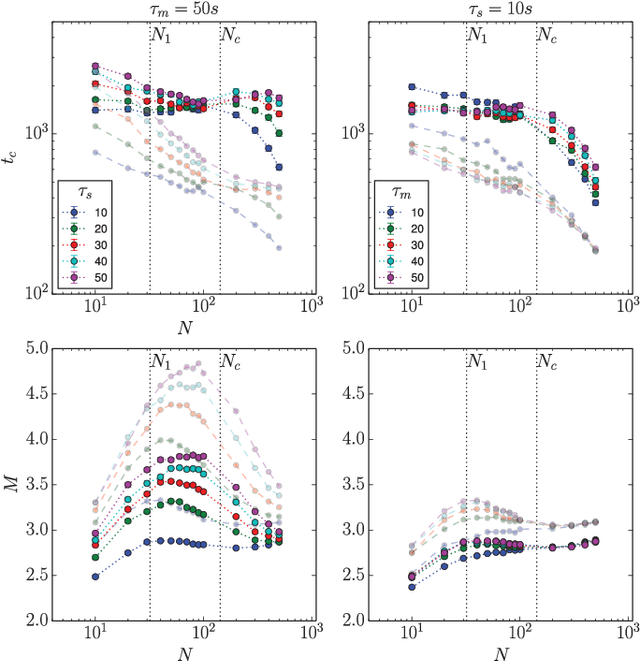
Consensus dynamics in decentralised multiagent systems are subject to intense studies, and several different models have been proposed and analysed. Among these, the naming game stands out for its simplicity and applicability to a wide range of phenomena and applications, from semiotics to engineering. Despite the wide range of studies available, the implementation of theoretical models in real distributed systems is not always straightforward, as the physical platform imposes several constraints that may have a bearing on the consensus dynamics. In this paper, we investigate the effects of an implementation of the naming game for the kilobot robotic platform, in which we consider concurrent execution of games and physical interferences. Consensus dynamics are analysed in the light of the continuously evolving communication network created by the robots, highlighting how the different regimes crucially depend on the robot density and on their ability to spread widely in the experimental arena. We find that physical interferences reduce the benefits resulting from robot mobility in terms of consensus time, but also result in lower cognitive load for individual agents.
* A supporting video is available here: https://mail.google.com/mail/u/0/#search/vito.trianni%40istc.cnr.it/15244cd6f27f0e99?projector=1