 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Climate Change Knowledge Graph: Supporting Climate Services
Feb 23, 2026Climate change impacts a broad spectrum of human resources and activities, necessitating the use of climate models to project long-term effects and inform mitigation and adaptation strategies. These models generate multiple datasets by running simulations across various scenarios and configurations, thereby covering a range of potential future outcomes. Currently, researchers rely on traditional search interfaces and APIs to retrieve such datasets, often piecing together information from metadata and community vocabularies. The Climate Change Knowledge Graph is designed to address these challenges by integrating diverse data sources related to climate simulations into a coherent and interoperable knowledge graph. This innovative resource allows for executing complex queries involving climate models, simulations, variables, spatio-temporal domains, and granularities. Developed with input from domain experts, the knowledge graph and its underlying ontology are published with open access license and provide a comprehensive framework that enhances the exploration of climate data, facilitating more informed decision-making in addressing climate change issues.
Combining Deep Architectures for Information Gain estimation and Reinforcement Learning for multiagent field exploration
May 29, 2025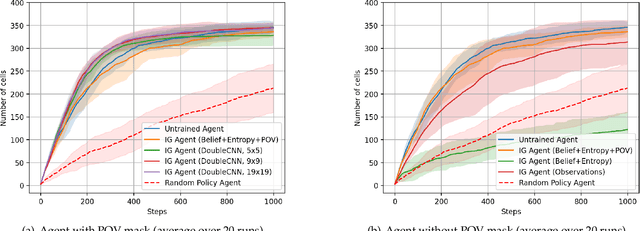
Precision agriculture requires efficient autonomous systems for crop monitoring, where agents must explore large-scale environments while minimizing resource consumption. This work addresses the problem as an active exploration task in a grid environment representing an agricultural field. Each cell may contain targets (e.g., damaged crops) observable from nine predefined points of view (POVs). Agents must infer the number of targets per cell using partial, sequential observations. We propose a two-stage deep learning framework. A pre-trained LSTM serves as a belief model, updating a probabilistic map of the environment and its associated entropy, which defines the expected information gain (IG). This allows agents to prioritize informative regions. A key contribution is the inclusion of a POV visibility mask in the input, preserving the Markov property under partial observability and avoiding revisits to already explored views. Three agent architectures were compared: an untrained IG-based agent selecting actions to maximize entropy reduction; a DQN agent using CNNs over local 3x3 inputs with belief, entropy, and POV mask; and a Double-CNN DQN agent with wider spatial context. Simulations on 20x20 maps showed that the untrained agent performs well despite its simplicity. The DQN agent matches this performance when the POV mask is included, while the Double-CNN agent consistently achieves superior exploration efficiency, especially in larger environments. Results show that uncertainty-aware policies leveraging entropy, belief states, and visibility tracking lead to robust and scalable exploration. Future work includes curriculum learning, multi-agent cooperation with shared rewards, transformer-based models, and intrinsic motivation mechanisms to further enhance learning efficiency and policy generalization.
Minimalist exploration strategies for robot swarms at the edge of chaos
Jun 19, 2024Effective exploration abilities are fundamental for robot swarms, especially when small, inexpensive robots are employed (e.g., micro- or nano-robots). Random walks are often the only viable choice if robots are too constrained regarding sensors and computation to implement state-of-the-art solutions. However, identifying the best random walk parameterisation may not be trivial. Additionally, variability among robots in terms of motion abilities-a very common condition when precise calibration is not possible-introduces the need for flexible solutions. This study explores how random walks that present chaotic or edge-of-chaos dynamics can be generated. We also evaluate their effectiveness for a simple exploration task performed by a swarm of simulated Kilobots. First, we show how Random Boolean Networks can be used as controllers for the Kilobots, achieving a significant performance improvement compared to the best parameterisation of a L\'evy-modulated Correlated Random Walk. Second, we demonstrate how chaotic dynamics are beneficial to maximise exploration effectiveness. Finally, we demonstrate how the exploration behavior produced by Boolean Networks can be optimized through an Evolutionary Robotics approach while maintaining the chaotic dynamics of the networks.
Expertise Trees Resolve Knowledge Limitations in Collective Decision-Making
May 04, 2023



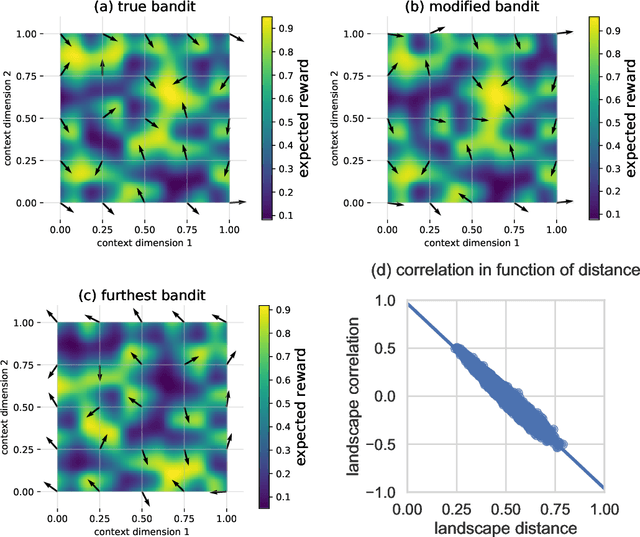
Experts advising decision-makers are likely to display expertise which varies as a function of the problem instance. In practice, this may lead to sub-optimal or discriminatory decisions against minority cases. In this work we model such changes in depth and breadth of knowledge as a partitioning of the problem space into regions of differing expertise. We provide here new algorithms that explicitly consider and adapt to the relationship between problem instances and experts' knowledge. We first propose and highlight the drawbacks of a naive approach based on nearest neighbor queries. To address these drawbacks we then introduce a novel algorithm - expertise trees - that constructs decision trees enabling the learner to select appropriate models. We provide theoretical insights and empirically validate the improved performance of our novel approach on a range of problems for which existing methods proved to be inadequate.
Monitoring and mapping of crop fields with UAV swarms based on information gain
Mar 22, 2022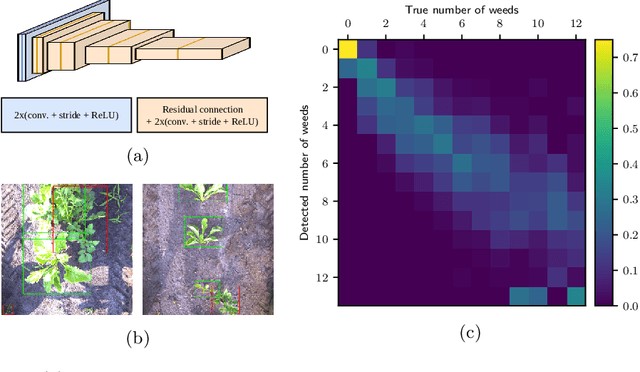
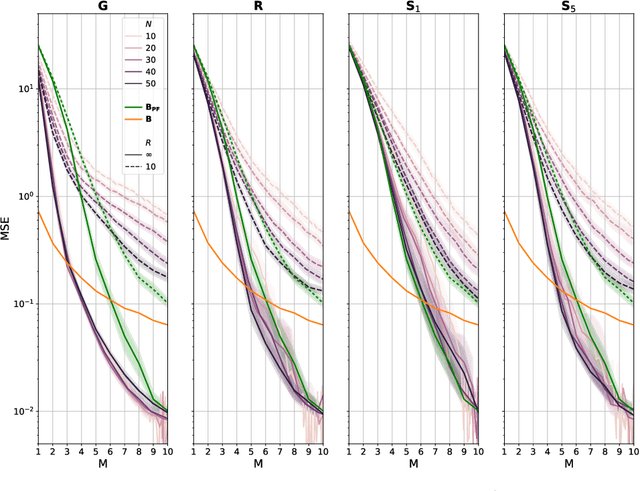

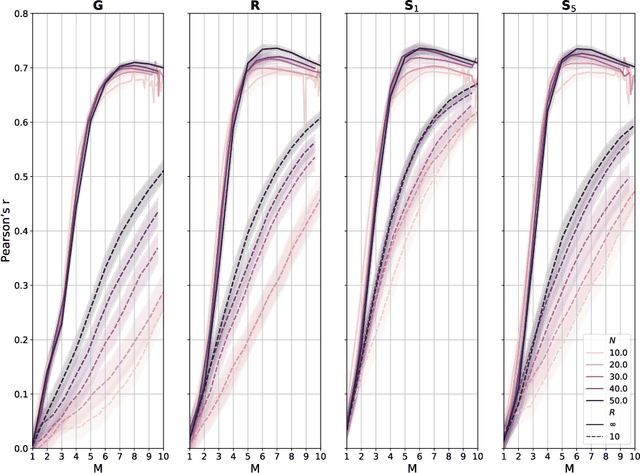
Monitoring crop fields to map features like weeds can be efficiently performed with unmanned aerial vehicles (UAVs) that can cover large areas in a short time due to their privileged perspective and motion speed. However, the need for high-resolution images for precise classification of features (e.g., detecting even the smallest weeds in the field) contrasts with the limited payload and ight time of current UAVs. Thus, it requires several flights to cover a large field uniformly. However, the assumption that the whole field must be observed with the same precision is unnecessary when features are heterogeneously distributed, like weeds appearing in patches over the field. In this case, an adaptive approach that focuses only on relevant areas can perform better, especially when multiple UAVs are employed simultaneously. Leveraging on a swarm-robotics approach, we propose a monitoring and mapping strategy that adaptively chooses the target areas based on the expected information gain, which measures the potential for uncertainty reduction due to further observations. The proposed strategy scales well with group size and leads to smaller mapping errors than optimal pre-planned monitoring approaches.
Dealing with Expert Bias in Collective Decision-Making
Jun 25, 2021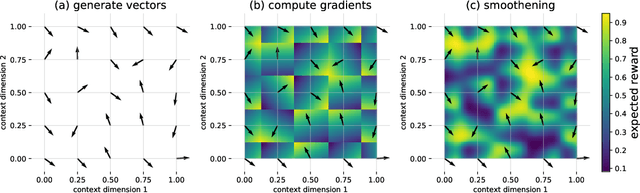
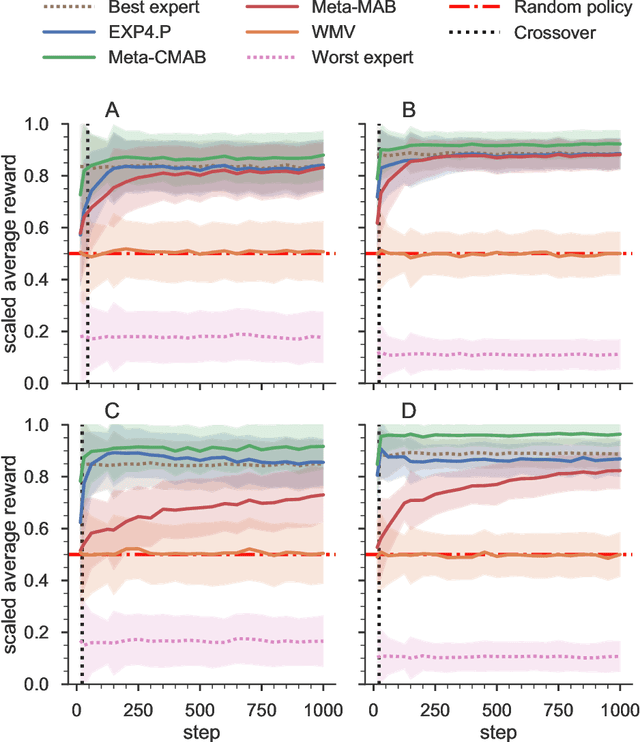
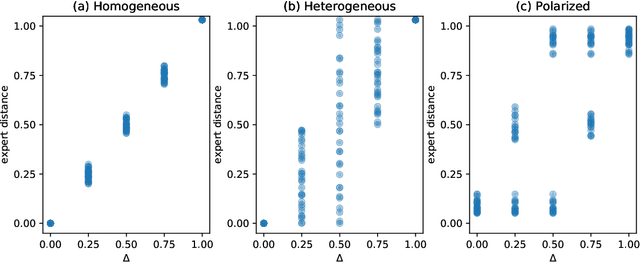
Quite some real-world problems can be formulated as decision-making problems wherein one must repeatedly make an appropriate choice from a set of alternatives. Expert judgements, whether human or artificial, can help in taking correct decisions, especially when exploration of alternative solutions is costly. As expert opinions might deviate, the problem of finding the right alternative can be approached as a collective decision making problem (CDM). Current state-of-the-art approaches to solve CDM are limited by the quality of the best expert in the group, and perform poorly if experts are not qualified or if they are overly biased, thus potentially derailing the decision-making process. In this paper, we propose a new algorithmic approach based on contextual multi-armed bandit problems (CMAB) to identify and counteract such biased expertises. We explore homogeneous, heterogeneous and polarised expert groups and show that this approach is able to effectively exploit the collective expertise, irrespective of whether the provided advice is directly conducive to good performance, outperforming state-of-the-art methods, especially when the quality of the provided expertise degrades. Our novel CMAB-inspired approach achieves a higher final performance and does so while converging more rapidly than previous adaptive algorithms, especially when heterogeneous expertise is readily available.
Emergent naming of resources in a foraging robot swarm
Oct 05, 2019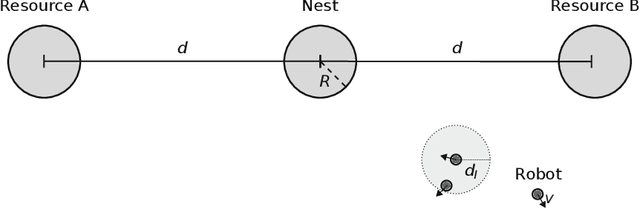
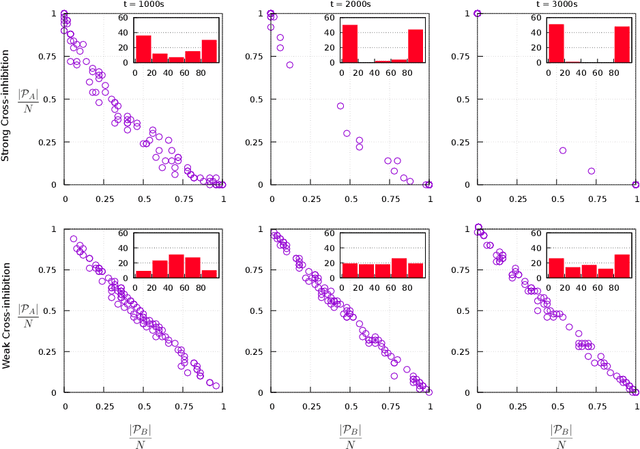
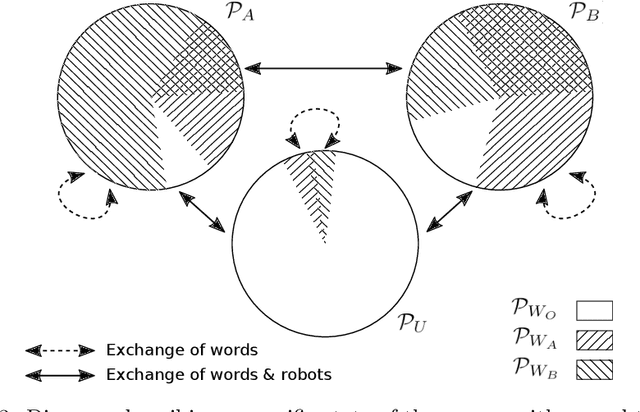
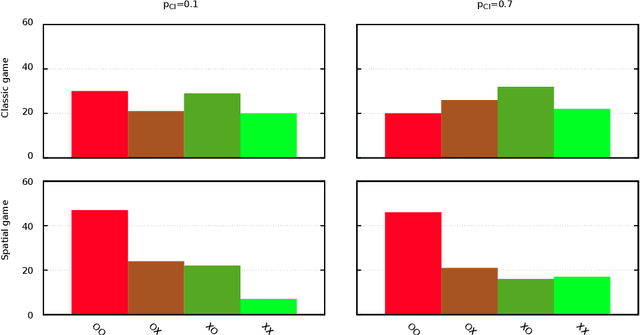
We investigate the emergence of language convention within a swarm of robots foraging in an open environment from two identical resources. While foraging, the swarm needs to explore and decide which resource to exploit, moving through complex transitory dynamics towards different possible equilibria, such as, selection of a single resource or spread across the two. Our point of interest is the understanding of possible correlations between the emergent, evolving, task-induced interaction network and the language dynamics. In particular, our goal is to determine whether the dynamics of the interaction network are sufficient to determine emergent naming conventions that represent features of the task execution (e.g., choice of one or the other resource) and of the environment, In other words, we look for an emergent vocabulary that is both complete (a word for each resource) and correct (no misnomer) for as long as each resource is relevant to the swarm. In this study, robots are playing two variants of the minimal language game. The classic one, where words are created when needed, and a new variant we introduce in this article: the spatial minimal naming game, where the creation of words is linked with the discovery of resources by exploring robots. We end the article by proposing a proof of concept extension of the spatial minimal naming game that assures the completeness and correctness of the swarms vocabulary.
Self-Organization and Artificial Life
Mar 14, 2019Self-organization can be broadly defined as the ability of a system to display ordered spatio-temporal patterns solely as the result of the interactions among the system components. Processes of this kind characterize both living and artificial systems, making self-organization a concept that is at the basis of several disciplines, from physics to biology to engineering. Placed at the frontiers between disciplines, Artificial Life (ALife) has heavily borrowed concepts and tools from the study of self-organization, providing mechanistic interpretations of life-like phenomena as well as useful constructivist approaches to artificial system design. Despite its broad usage within ALife, the concept of self-organization has been often excessively stretched or misinterpreted, calling for a clarification that could help with tracing the borders between what can and cannot be considered self-organization. In this review, we discuss the fundamental aspects of self-organization and list the main usages within three primary ALife domains, namely "soft" (mathematical/computational modeling), "hard" (physical robots), and "wet" (chemical/biological systems) ALife. Finally, we discuss the usefulness of self-organization within ALife studies, point to perspectives for future research, and list open questions.
Self-Organization and Artificial Life: A Review
Apr 03, 2018Self-organization has been an important concept within a number of disciplines, which Artificial Life (ALife) also has heavily utilized since its inception. The term and its implications, however, are often confusing or misinterpreted. In this work, we provide a mini-review of self-organization and its relationship with ALife, aiming at initiating discussions on this important topic with the interested audience. We first articulate some fundamental aspects of self-organization, outline its usage, and review its applications to ALife within its soft, hard, and wet domains. We also provide perspectives for further research.
Emergence of Consensus in a Multi-Robot Network: from Abstract Models to Empirical Validation
Jan 19, 2016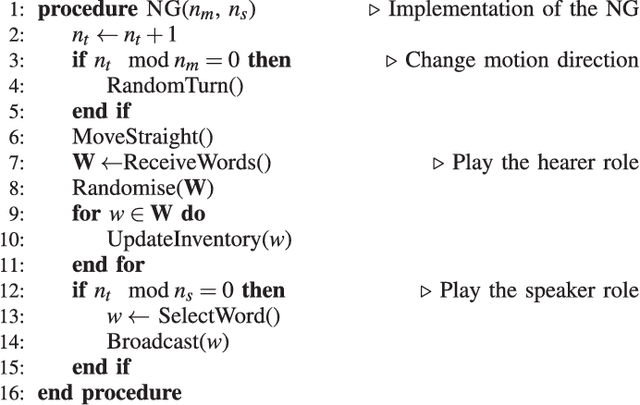
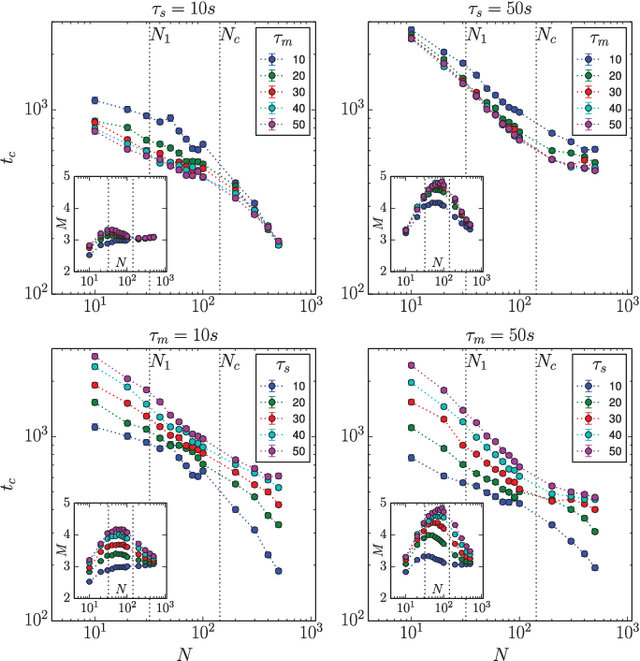
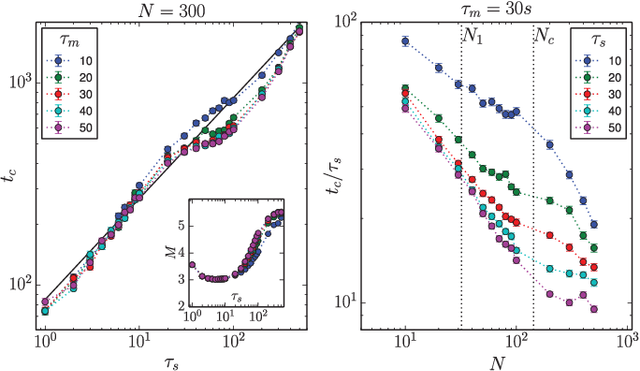
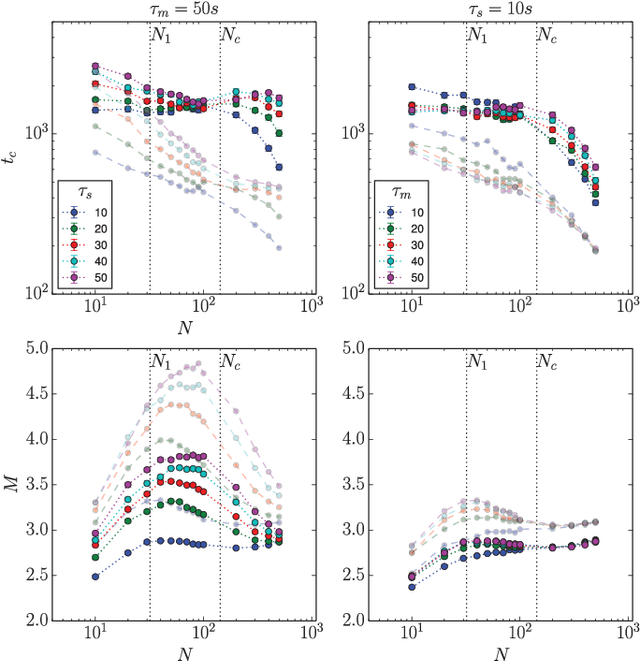
Consensus dynamics in decentralised multiagent systems are subject to intense studies, and several different models have been proposed and analysed. Among these, the naming game stands out for its simplicity and applicability to a wide range of phenomena and applications, from semiotics to engineering. Despite the wide range of studies available, the implementation of theoretical models in real distributed systems is not always straightforward, as the physical platform imposes several constraints that may have a bearing on the consensus dynamics. In this paper, we investigate the effects of an implementation of the naming game for the kilobot robotic platform, in which we consider concurrent execution of games and physical interferences. Consensus dynamics are analysed in the light of the continuously evolving communication network created by the robots, highlighting how the different regimes crucially depend on the robot density and on their ability to spread widely in the experimental arena. We find that physical interferences reduce the benefits resulting from robot mobility in terms of consensus time, but also result in lower cognitive load for individual agents.
* A supporting video is available here: https://mail.google.com/mail/u/0/#search/vito.trianni%40istc.cnr.it/15244cd6f27f0e99?projector=1