 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergent naming of resources in a foraging robot swarm
Paper and Code
Oct 05, 2019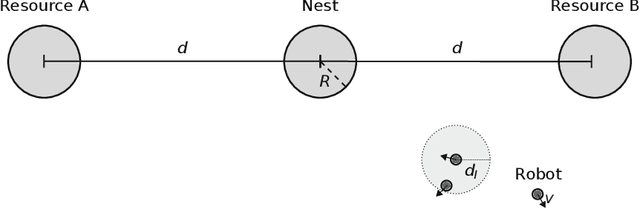
We investigate the emergence of language convention within a swarm of robots foraging in an open environment from two identical resources. While foraging, the swarm needs to explore and decide which resource to exploit, moving through complex transitory dynamics towards different possible equilibria, such as, selection of a single resource or spread across the two. Our point of interest is the understanding of possible correlations between the emergent, evolving, task-induced interaction network and the language dynamics. In particular, our goal is to determine whether the dynamics of the interaction network are sufficient to determine emergent naming conventions that represent features of the task execution (e.g., choice of one or the other resource) and of the environment, In other words, we look for an emergent vocabulary that is both complete (a word for each resource) and correct (no misnomer) for as long as each resource is relevant to the swarm. In this study, robots are playing two variants of the minimal language game. The classic one, where words are created when needed, and a new variant we introduce in this article: the spatial minimal naming game, where the creation of words is linked with the discovery of resources by exploring robots. We end the article by proposing a proof of concept extension of the spatial minimal naming game that assures the completeness and correctness of the swarms vocabulary.