 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsistentDreamer: View-Consistent Meshes Through Balanced Multi-View Gaussian Optimization
Feb 13, 2025Recent advances in diffusion models have significantly improved 3D generation, enabling the use of assets generated from an image for embodied AI simulations. However, the one-to-many nature of the image-to-3D problem limits their use due to inconsistent content and quality across views. Previous models optimize a 3D model by sampling views from a view-conditioned diffusion prior, but diffusion models cannot guarantee view consistency. Instead, we present ConsistentDreamer, where we first generate a set of fixed multi-view prior images and sample random views between them with another diffusion model through a score distillation sampling (SDS) loss. Thereby, we limit the discrepancies between the views guided by the SDS loss and ensure a consistent rough shape. In each iteration, we also use our generated multi-view prior images for fine-detail reconstruction. To balance between the rough shape and the fine-detail optimizations, we introduce dynamic task-dependent weights based on homoscedastic uncertainty, updated automatically in each iteration. Additionally, we employ opacity, depth distortion, and normal alignment losses to refine the surface for mesh extraction. Our method ensures better view consistency and visual quality compared to the state-of-the-art.
Monitoring and mapping of crop fields with UAV swarms based on information gain
Mar 22, 2022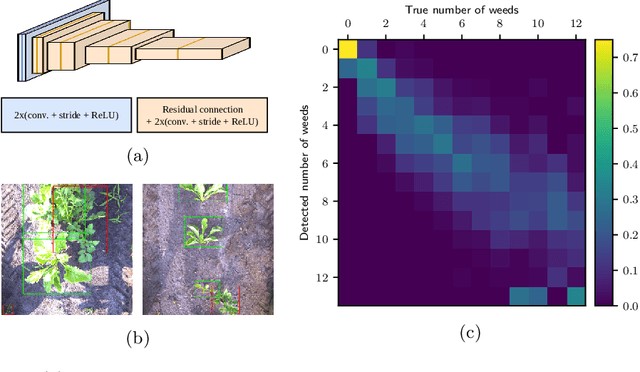

Monitoring crop fields to map features like weeds can be efficiently performed with unmanned aerial vehicles (UAVs) that can cover large areas in a short time due to their privileged perspective and motion speed. However, the need for high-resolution images for precise classification of features (e.g., detecting even the smallest weeds in the field) contrasts with the limited payload and ight time of current UAVs. Thus, it requires several flights to cover a large field uniformly. However, the assumption that the whole field must be observed with the same precision is unnecessary when features are heterogeneously distributed, like weeds appearing in patches over the field. In this case, an adaptive approach that focuses only on relevant areas can perform better, especially when multiple UAVs are employed simultaneously. Leveraging on a swarm-robotics approach, we propose a monitoring and mapping strategy that adaptively chooses the target areas based on the expected information gain, which measures the potential for uncertainty reduction due to further observations. The proposed strategy scales well with group size and leads to smaller mapping errors than optimal pre-planned monitoring approaches.