 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoVAR: Co-generation of Video and Action for Robotic Manipulation via Multi-Modal Diffusion
Dec 17, 2025We present a method to generate video-action pairs that follow text instructions, starting from an initial image observation and the robot's joint states. Our approach automatically provides action labels for video diffusion models, overcoming the common lack of action annotations and enabling their full use for robotic policy learning. Existing methods either adopt two-stage pipelines, which limit tightly coupled cross-modal information sharing, or rely on adapting a single-modal diffusion model for a joint distribution that cannot fully leverage pretrained video knowledge. To overcome these limitations, we (1) extend a pretrained video diffusion model with a parallel, dedicated action diffusion model that preserves pretrained knowledge, (2) introduce a Bridge Attention mechanism to enable effective cross-modal interaction, and (3) design an action refinement module to convert coarse actions into precise controls for low-resolution datasets. Extensive evaluations on multiple public benchmarks and real-world datasets demonstrate that our method generates higher-quality videos, more accurate actions, and significantly outperforms existing baselines, offering a scalable framework for leveraging large-scale video data for robotic learning.
DRAW2ACT: Turning Depth-Encoded Trajectories into Robotic Demonstration Videos
Dec 16, 2025Video diffusion models provide powerful real-world simulators for embodied AI but remain limited in controllability for robotic manipulation. Recent works on trajectory-conditioned video generation address this gap but often rely on 2D trajectories or single modality conditioning, which restricts their ability to produce controllable and consistent robotic demonstrations. We present DRAW2ACT, a depth-aware trajectory-conditioned video generation framework that extracts multiple orthogonal representations from the input trajectory, capturing depth, semantics, shape and motion, and injects them into the diffusion model. Moreover, we propose to jointly generate spatially aligned RGB and depth videos, leveraging cross-modality attention mechanisms and depth supervision to enhance the spatio-temporal consistency. Finally, we introduce a multimodal policy model conditioned on the generated RGB and depth sequences to regress the robot's joint angles. Experiments on Bridge V2, Berkeley Autolab, and simulation benchmarks show that DRAW2ACT achieves superior visual fidelity and consistency while yielding higher manipulation success rates compared to existing baselines.
RoboSwap: A GAN-driven Video Diffusion Framework For Unsupervised Robot Arm Swapping
Jun 10, 2025Recent advancements in generative models have revolutionized video synthesis and editing. However, the scarcity of diverse, high-quality datasets continues to hinder video-conditioned robotic learning, limiting cross-platform generalization. In this work, we address the challenge of swapping a robotic arm in one video with another: a key step for crossembodiment learning. Unlike previous methods that depend on paired video demonstrations in the same environmental settings, our proposed framework, RoboSwap, operates on unpaired data from diverse environments, alleviating the data collection needs. RoboSwap introduces a novel video editing pipeline integrating both GANs and diffusion models, combining their isolated advantages. Specifically, we segment robotic arms from their backgrounds and train an unpaired GAN model to translate one robotic arm to another. The translated arm is blended with the original video background and refined with a diffusion model to enhance coherence, motion realism and object interaction. The GAN and diffusion stages are trained independently. Our experiments demonstrate that RoboSwap outperforms state-of-the-art video and image editing models on three benchmarks in terms of both structural coherence and motion consistency, thereby offering a robust solution for generating reliable, cross-embodiment data in robotic learning.
CE-NPBG: Connectivity Enhanced Neural Point-Based Graphics for Novel View Synthesis in Autonomous Driving Scenes
Apr 28, 2025Current point-based approaches encounter limitations in scalability and rendering quality when using large 3D point cloud maps because using them directly for novel view synthesis (NVS) leads to degraded visualizations. We identify the primary issue behind these low-quality renderings as a visibility mismatch between geometry and appearance, stemming from using these two modalities together. To address this problem, we present CE-NPBG, a new approach for novel view synthesis (NVS) in large-scale autonomous driving scenes. Our method is a neural point-based technique that leverages two modalities: posed images (cameras) and synchronized raw 3D point clouds (LiDAR). We first employ a connectivity relationship graph between appearance and geometry, which retrieves points from a large 3D point cloud map observed from the current camera perspective and uses them for rendering. By leveraging this connectivity, our method significantly improves rendering quality and enhances run-time and scalability by using only a small subset of points from the large 3D point cloud map. Our approach associates neural descriptors with the points and uses them to synthesize views. To enhance the encoding of these descriptors and elevate rendering quality, we propose a joint adversarial and point rasterization training. During training, we pair an image-synthesizer network with a multi-resolution discriminator. At inference, we decouple them and use the image-synthesizer to generate novel views. We also integrate our proposal into the recent 3D Gaussian Splatting work to highlight its benefits for improved rendering and scalability.
ConsistentDreamer: View-Consistent Meshes Through Balanced Multi-View Gaussian Optimization
Feb 13, 2025Recent advances in diffusion models have significantly improved 3D generation, enabling the use of assets generated from an image for embodied AI simulations. However, the one-to-many nature of the image-to-3D problem limits their use due to inconsistent content and quality across views. Previous models optimize a 3D model by sampling views from a view-conditioned diffusion prior, but diffusion models cannot guarantee view consistency. Instead, we present ConsistentDreamer, where we first generate a set of fixed multi-view prior images and sample random views between them with another diffusion model through a score distillation sampling (SDS) loss. Thereby, we limit the discrepancies between the views guided by the SDS loss and ensure a consistent rough shape. In each iteration, we also use our generated multi-view prior images for fine-detail reconstruction. To balance between the rough shape and the fine-detail optimizations, we introduce dynamic task-dependent weights based on homoscedastic uncertainty, updated automatically in each iteration. Additionally, we employ opacity, depth distortion, and normal alignment losses to refine the surface for mesh extraction. Our method ensures better view consistency and visual quality compared to the state-of-the-art.
Implicit Learning of Scene Geometry from Poses for Global Localization
Dec 04, 2023Global visual localization estimates the absolute pose of a camera using a single image, in a previously mapped area. Obtaining the pose from a single image enables many robotics and augmented/virtual reality applications. Inspired by latest advances in deep learning, many existing approaches directly learn and regress 6 DoF pose from an input image. However, these methods do not fully utilize the underlying scene geometry for pose regression. The challenge in monocular relocalization is the minimal availability of supervised training data, which is just the corresponding 6 DoF poses of the images. In this paper, we propose to utilize these minimal available labels (.i.e, poses) to learn the underlying 3D geometry of the scene and use the geometry to estimate the 6 DoF camera pose. We present a learning method that uses these pose labels and rigid alignment to learn two 3D geometric representations (\textit{X, Y, Z coordinates}) of the scene, one in camera coordinate frame and the other in global coordinate frame. Given a single image, it estimates these two 3D scene representations, which are then aligned to estimate a pose that matches the pose label. This formulation allows for the active inclusion of additional learning constraints to minimize 3D alignment errors between the two 3D scene representations, and 2D re-projection errors between the 3D global scene representation and 2D image pixels, resulting in improved localization accuracy. During inference, our model estimates the 3D scene geometry in camera and global frames and aligns them rigidly to obtain pose in real-time. We evaluate our work on three common visual localization datasets, conduct ablation studies, and show that our method exceeds state-of-the-art regression methods' pose accuracy on all datasets.
Global Localization: Utilizing Relative Spatio-Temporal Geometric Constraints from Adjacent and Distant Cameras
Dec 01, 2023



Re-localizing a camera from a single image in a previously mapped area is vital for many computer vision applications in robotics and augmented/virtual reality. In this work, we address the problem of estimating the 6 DoF camera pose relative to a global frame from a single image. We propose to leverage a novel network of relative spatial and temporal geometric constraints to guide the training of a Deep Network for localization. We employ simultaneously spatial and temporal relative pose constraints that are obtained not only from adjacent camera frames but also from camera frames that are distant in the spatio-temporal space of the scene. We show that our method, through these constraints, is capable of learning to localize when little or very sparse ground-truth 3D coordinates are available. In our experiments, this is less than 1% of available ground-truth data. We evaluate our method on 3 common visual localization datasets and show that it outperforms other direct pose estimation methods.
Long-Term Invariant Local Features via Implicit Cross-Domain Correspondences
Nov 06, 2023



Modern learning-based visual feature extraction networks perform well in intra-domain localization, however, their performance significantly declines when image pairs are captured across long-term visual domain variations, such as different seasonal and daytime variations. In this paper, our first contribution is a benchmark to investigate the performance impact of long-term variations on visual localization. We conduct a thorough analysis of the performance of current state-of-the-art feature extraction networks under various domain changes and find a significant performance gap between intra- and cross-domain localization. We investigate different methods to close this gap by improving the supervision of modern feature extractor networks. We propose a novel data-centric method, Implicit Cross-Domain Correspondences (iCDC). iCDC represents the same environment with multiple Neural Radiance Fields, each fitting the scene under individual visual domains. It utilizes the underlying 3D representations to generate accurate correspondences across different long-term visual conditions. Our proposed method enhances cross-domain localization performance, significantly reducing the performance gap. When evaluated on popular long-term localization benchmarks, our trained networks consistently outperform existing methods. This work serves as a substantial stride toward more robust visual localization pipelines for long-term deployments, and opens up research avenues in the development of long-term invariant descriptors.
PixSelect: Less but Reliable Pixels for Accurate and Efficient Localization
Jun 08, 2022

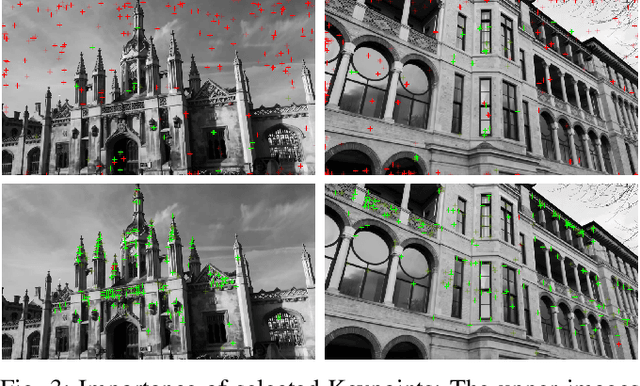
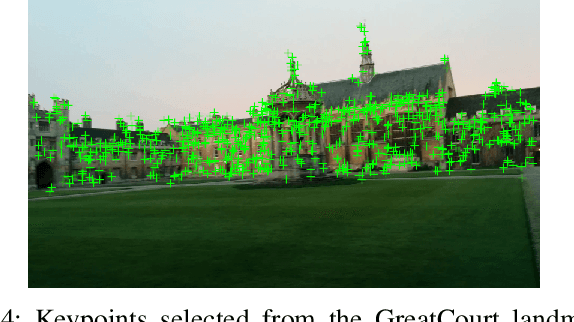
Accurate camera pose estimation is a fundamental requirement for numerous applications, such as autonomous driving, mobile robotics, and augmented reality. In this work, we address the problem of estimating the global 6 DoF camera pose from a single RGB image in a given environment. Previous works consider every part of the image valuable for localization. However, many image regions such as the sky, occlusions, and repetitive non-distinguishable patterns cannot be utilized for localization. In addition to adding unnecessary computation efforts, extracting and matching features from such regions produce many wrong matches which in turn degrades the localization accuracy and efficiency. Our work addresses this particular issue and shows by exploiting an interesting concept of sparse 3D models that we can exploit discriminatory environment parts and avoid useless image regions for the sake of a single image localization. Interestingly, through avoiding selecting keypoints from non-reliable image regions such as trees, bushes, cars, pedestrians, and occlusions, our work acts naturally as an outlier filter. This makes our system highly efficient in that minimal set of correspondences is needed and highly accurate as the number of outliers is low. Our work exceeds state-ofthe-art methods on outdoor Cambridge Landmarks dataset. With only relying on single image at inference, it outweighs in terms of accuracy methods that exploit pose priors and/or reference 3D models while being much faster. By choosing as little as 100 correspondences, it surpasses similar methods that localize from thousands of correspondences, while being more efficient. In particular, it achieves, compared to these methods, an improvement of localization by 33% on OldHospital scene. Furthermore, It outstands direct pose regressors even those that learn from sequence of images