 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixSelect: Less but Reliable Pixels for Accurate and Efficient Localization
Paper and Code
Jun 08, 2022

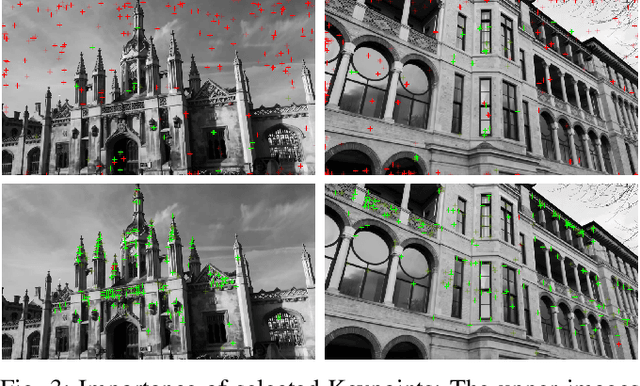
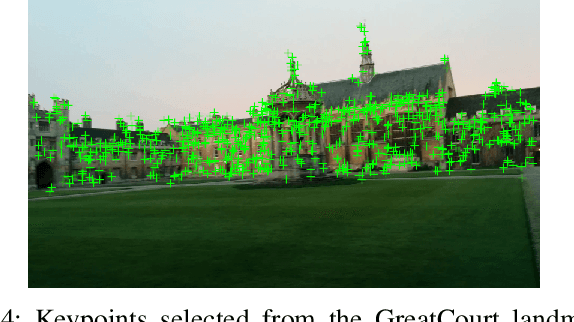
Accurate camera pose estimation is a fundamental requirement for numerous applications, such as autonomous driving, mobile robotics, and augmented reality. In this work, we address the problem of estimating the global 6 DoF camera pose from a single RGB image in a given environment. Previous works consider every part of the image valuable for localization. However, many image regions such as the sky, occlusions, and repetitive non-distinguishable patterns cannot be utilized for localization. In addition to adding unnecessary computation efforts, extracting and matching features from such regions produce many wrong matches which in turn degrades the localization accuracy and efficiency. Our work addresses this particular issue and shows by exploiting an interesting concept of sparse 3D models that we can exploit discriminatory environment parts and avoid useless image regions for the sake of a single image localization. Interestingly, through avoiding selecting keypoints from non-reliable image regions such as trees, bushes, cars, pedestrians, and occlusions, our work acts naturally as an outlier filter. This makes our system highly efficient in that minimal set of correspondences is needed and highly accurate as the number of outliers is low. Our work exceeds state-ofthe-art methods on outdoor Cambridge Landmarks dataset. With only relying on single image at inference, it outweighs in terms of accuracy methods that exploit pose priors and/or reference 3D models while being much faster. By choosing as little as 100 correspondences, it surpasses similar methods that localize from thousands of correspondences, while being more efficient. In particular, it achieves, compared to these methods, an improvement of localization by 33% on OldHospital scene. Furthermore, It outstands direct pose regressors even those that learn from sequence of images