 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimalist exploration strategies for robot swarms at the edge of chaos
Jun 19, 2024Effective exploration abilities are fundamental for robot swarms, especially when small, inexpensive robots are employed (e.g., micro- or nano-robots). Random walks are often the only viable choice if robots are too constrained regarding sensors and computation to implement state-of-the-art solutions. However, identifying the best random walk parameterisation may not be trivial. Additionally, variability among robots in terms of motion abilities-a very common condition when precise calibration is not possible-introduces the need for flexible solutions. This study explores how random walks that present chaotic or edge-of-chaos dynamics can be generated. We also evaluate their effectiveness for a simple exploration task performed by a swarm of simulated Kilobots. First, we show how Random Boolean Networks can be used as controllers for the Kilobots, achieving a significant performance improvement compared to the best parameterisation of a L\'evy-modulated Correlated Random Walk. Second, we demonstrate how chaotic dynamics are beneficial to maximise exploration effectiveness. Finally, we demonstrate how the exploration behavior produced by Boolean Networks can be optimized through an Evolutionary Robotics approach while maintaining the chaotic dynamics of the networks.
The Role of Environmental Variations in Evolutionary Robotics: Maximizing Performance and Robustness
Aug 04, 2022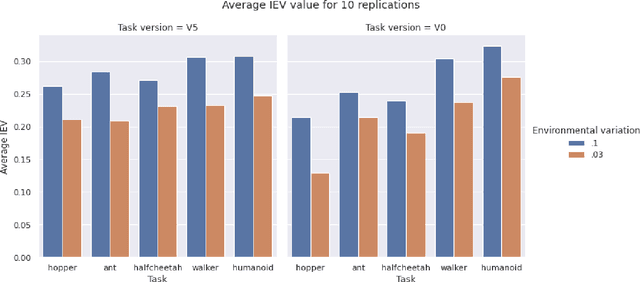
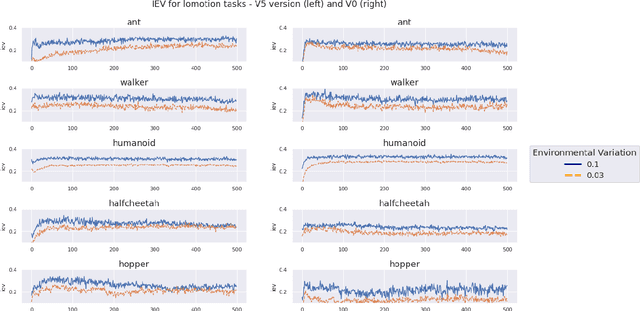
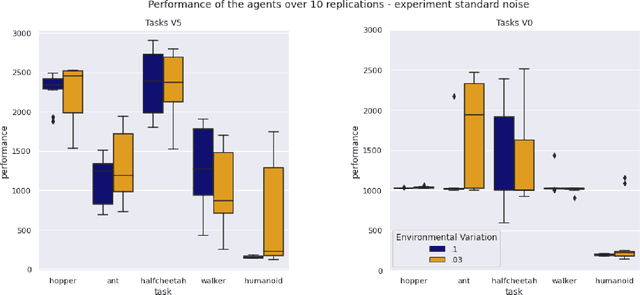
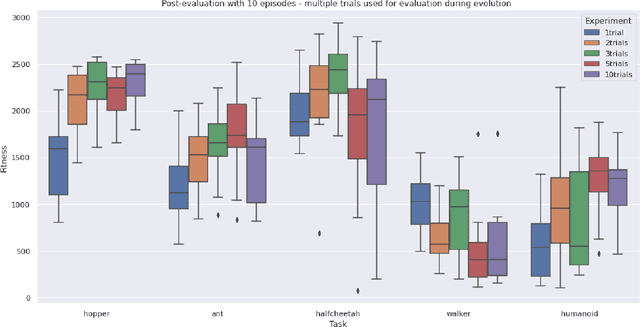
Exposing evolving robots to variable conditions is necessary to obtain solutions which are robust to environmental variations and which can cross the reality gap. However, we do not yet have methods for analyzing and understanding the impact of environmental variations on the evolutionary process, and therefore for choosing suitable variation ranges. In this article we introduce a method that permits us to measure the impact of environmental variations and we analyze the relation between the amplitude of variations, the modality with which they are introduced, and the performance and robustness of evolving agents. Our results demonstrate that (i) the evolutionary algorithm can tolerate environmental variations which have a very high impact, (ii) variations affecting the actions of the agent are tolerated much better than variations affecting the initial state of the agent or of the environment, and (iii) improving the accuracy of the fitness measure through multiple evaluations is not always useful. Moreover, our results show that environmental variations permit generating solutions which perform better both in varying and non-varying environments.