 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Role of Environmental Variations in Evolutionary Robotics: Maximizing Performance and Robustness
Paper and Code
Aug 04, 2022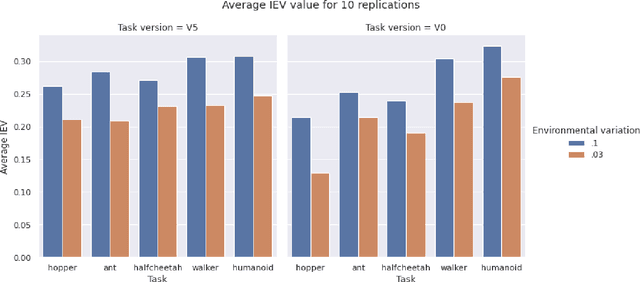
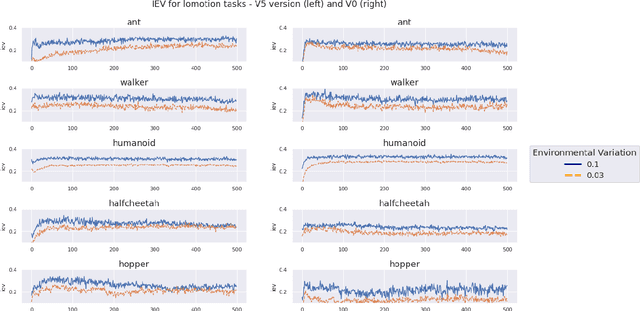
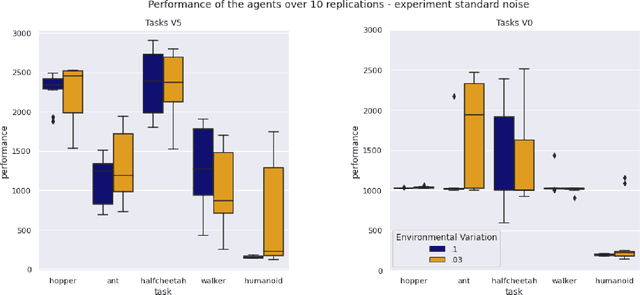
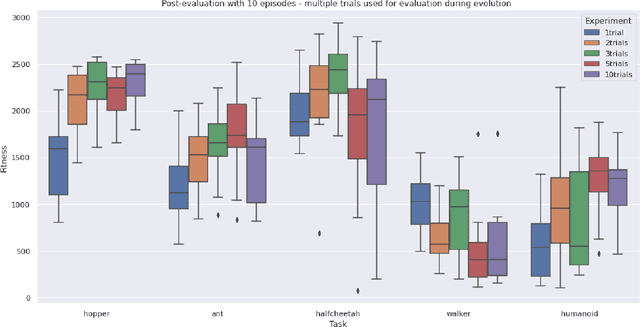
Exposing evolving robots to variable conditions is necessary to obtain solutions which are robust to environmental variations and which can cross the reality gap. However, we do not yet have methods for analyzing and understanding the impact of environmental variations on the evolutionary process, and therefore for choosing suitable variation ranges. In this article we introduce a method that permits us to measure the impact of environmental variations and we analyze the relation between the amplitude of variations, the modality with which they are introduced, and the performance and robustness of evolving agents. Our results demonstrate that (i) the evolutionary algorithm can tolerate environmental variations which have a very high impact, (ii) variations affecting the actions of the agent are tolerated much better than variations affecting the initial state of the agent or of the environment, and (iii) improving the accuracy of the fitness measure through multiple evaluations is not always useful. Moreover, our results show that environmental variations permit generating solutions which perform better both in varying and non-varying environments.