 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Modes as a Tool for Comparing the Mathematical Structure of Dynamic Models of Soft Robots
Paper and Code
Feb 10, 2024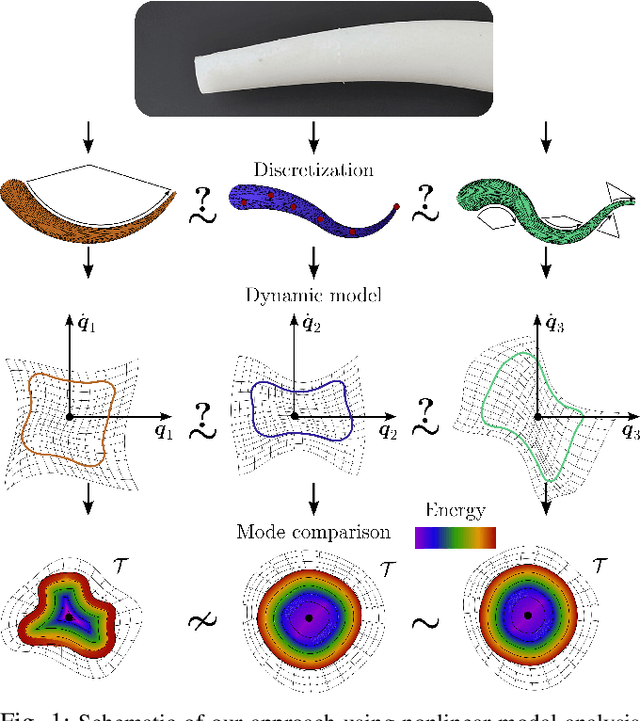



Continuum soft robots are nonlinear mechanical systems with theoretically infinite degrees of freedom (DoFs) that exhibit complex behaviors. Achieving motor intelligence under dynamic conditions necessitates the development of control-oriented reduced-order models (ROMs), which employ as few DoFs as possible while still accurately capturing the core characteristics of the theoretically infinite-dimensional dynamics. However, there is no quantitative way to measure if the ROM of a soft robot has succeeded in this task. In other fields, like structural dynamics or flexible link robotics, linear normal modes are routinely used to this end. Yet, this theory is not applicable to soft robots due to their nonlinearities. In this work, we propose to use the recent nonlinear extension in modal theory -- called eigenmanifolds -- as a means to evaluate control-oriented models for soft robots and compare them. To achieve this, we propose three similarity metrics relying on the projection of the nonlinear modes of the system into a task space of interest. We use this approach to compare quantitatively, for the first time, ROMs of increasing order generated under the piecewise constant curvature (PCC) hypothesis with a high-dimensional finite element (FE)-like model of a soft arm. Results show that by increasing the order of the discretization, the eigenmanifolds of the PCC model converge to those of the FE model.