 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePokeFlex: A Real-World Dataset of Deformable Objects for Robotics
Oct 10, 2024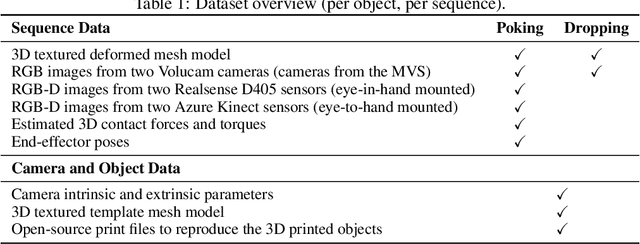
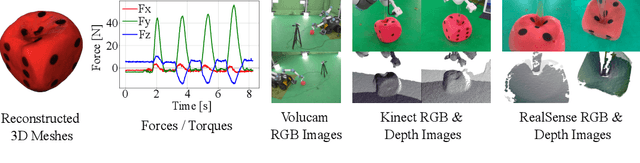
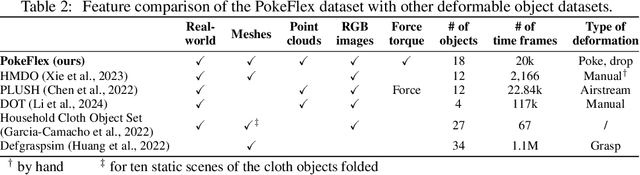
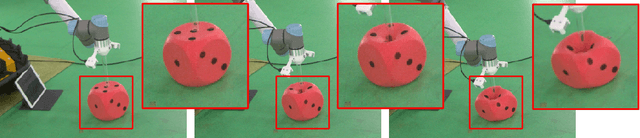
Data-driven methods have shown great potential in solving challenging manipulation tasks, however, their application in the domain of deformable objects has been constrained, in part, by the lack of data. To address this, we propose PokeFlex, a dataset featuring real-world paired and annotated multimodal data that includes 3D textured meshes, point clouds, RGB images, and depth maps. Such data can be leveraged for several downstream tasks such as online 3D mesh reconstruction, and it can potentially enable underexplored applications such as the real-world deployment of traditional control methods based on mesh simulations. To deal with the challenges posed by real-world 3D mesh reconstruction, we leverage a professional volumetric capture system that allows complete 360{\deg} reconstruction. PokeFlex consists of 18 deformable objects with varying stiffness and shapes. Deformations are generated by dropping objects onto a flat surface or by poking the objects with a robot arm. Interaction forces and torques are also reported for the latter case. Using different data modalities, we demonstrated a use case for the PokeFlex dataset in online 3D mesh reconstruction. We refer the reader to our website ( https://pokeflex-dataset.github.io/ ) for demos and examples of our dataset.
PokeFlex: Towards a Real-World Dataset of Deformable Objects for Robotic Manipulation
Sep 25, 2024



Advancing robotic manipulation of deformable objects can enable automation of repetitive tasks across multiple industries, from food processing to textiles and healthcare. Yet robots struggle with the high dimensionality of deformable objects and their complex dynamics. While data-driven methods have shown potential for solving manipulation tasks, their application in the domain of deformable objects has been constrained by the lack of data. To address this, we propose PokeFlex, a pilot dataset featuring real-world 3D mesh data of actively deformed objects, together with the corresponding forces and torques applied by a robotic arm, using a simple poking strategy. Deformations are captured with a professional volumetric capture system that allows for complete 360-degree reconstruction. The PokeFlex dataset consists of five deformable objects with varying stiffness and shapes. Additionally, we leverage the PokeFlex dataset to train a vision model for online 3D mesh reconstruction from a single image and a template mesh. We refer readers to the supplementary material and to our website ( https://pokeflex-dataset.github.io/ ) for demos and examples of our dataset.
TRTM: Template-based Reconstruction and Target-oriented Manipulation of Crumpled Cloths
Aug 09, 2023Precisely reconstructing and manipulating crumpled cloths is challenging due to the high dimensionality of the cloth model, as well as the limited observation at self-occluded regions. We leverage the recent progress in the field of single-view human body reconstruction to template-based reconstruct the crumpled cloths from their top-view depth observations only, with our proposed sim-real registration protocols. In contrast to previous implicit cloth representations, our reconstruction mesh explicitly indicates the positions and visibilities of the entire cloth mesh vertices, enabling more efficient dual-arm and single-arm target-oriented manipulations. Experiments demonstrate that our template-based reconstruction and target-oriented manipulation (TRTM) system can be applied to daily cloths with similar topologies as our template mesh, but have different shapes, sizes, patterns, and physical properties. Videos, datasets, pre-trained models, and code can be downloaded from our project website: https://wenbwa.github.io/TRTM/.
Embracing Safe Contacts with Contact-aware Planning and Control
Aug 08, 2023Unlike human beings that can employ the entire surface of their limbs as a means to establish contact with their environment, robots are typically programmed to interact with their environments via their end-effectors, in a collision-free fashion, to avoid damaging their environment. In a departure from such a traditional approach, this work presents a contact-aware controller for reference tracking that maintains interaction forces on the surface of the robot below a safety threshold in the presence of both rigid and soft contacts. Furthermore, we leveraged the proposed controller to extend the BiTRRT sample-based planning method to be contact-aware, using a simplified contact model. The effectiveness of our framework is demonstrated in hardware experiments using a Franka robot in a setup inspired by the Amazon stowing task. A demo video of our results can be seen here: https://youtu.be/2WeYytauhNg
RL + Model-based Control: Using On-demand Optimal Control to Learn Versatile Legged Locomotion
May 29, 2023This letter presents a versatile control method for dynamic and robust legged locomotion that integrates model-based optimal control with reinforcement learning (RL). Our approach involves training an RL policy to imitate reference motions generated on-demand through solving a finite-horizon optimal control problem. This integration enables the policy to leverage human expertise in generating motions to imitate while also allowing it to generalize to more complex scenarios that require a more complex dynamics model. Our method successfully learns control policies capable of generating diverse quadrupedal gait patterns and maintaining stability against unexpected external perturbations in both simulation and hardware experiments. Furthermore, we demonstrate the adaptability of our method to more complex locomotion tasks on uneven terrain without the need for excessive reward shaping or hyperparameter tuning.
Trajectory Optimization Using Neural Network Gradients of Learned Dynamics
Apr 09, 2022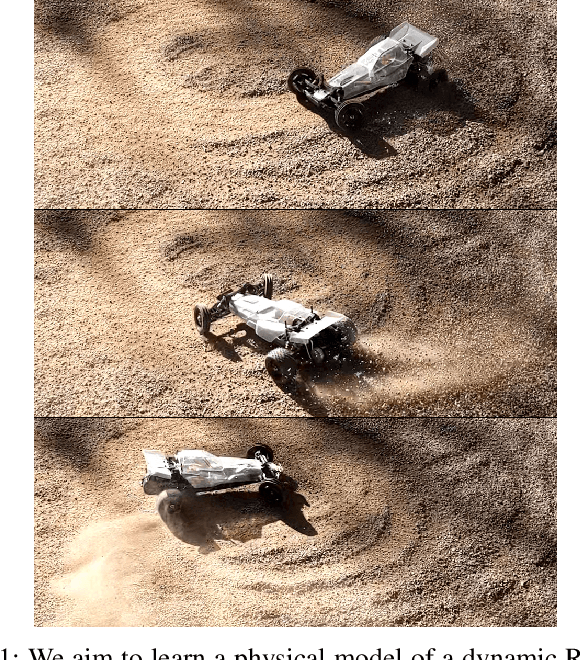
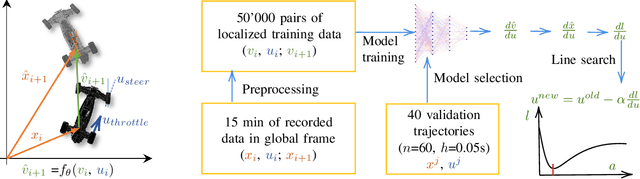
Trajectory optimization methods have achieved an exceptional level of performance on real-world robots in recent years. These methods heavily rely on accurate physics simulators, yet some aspects of the physical world, such as friction, can only be captured to a limited extent by most simulators. The goal of this paper is to leverage trajectory optimization for performing highly dynamic and complex tasks with robotic systems in absence of an accurate physics simulator. This is achieved by applying machine learning techniques to learn a differentiable dynamics model of the system from data. On the example of a RC car, we show that from data collected in only 15 minutes of human-operated interactions with the car, a neural network is able to model highly nonlinear behaviors such as loss of traction and drifting. Furthermore, we use the analytical gradients of the neural network to perform gradient-based trajectory optimization, both in an offline and online setting. We find that our learned model is able to represent complex physical behavior, like drifting and gives unprecedented performance in combination with trajectory optimization methods.
Learning Solution Manifolds for Control Problems via Energy Minimization
Mar 07, 2022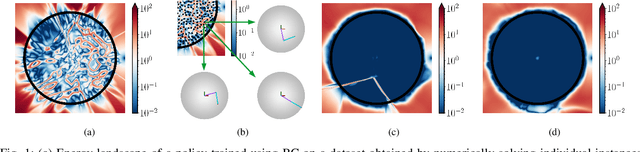
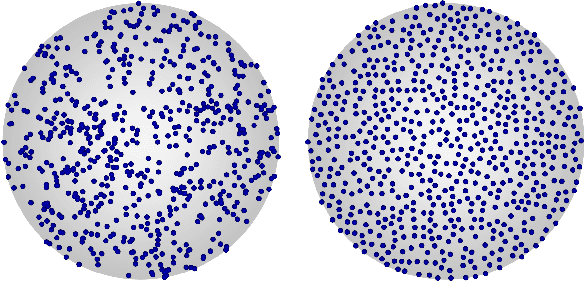
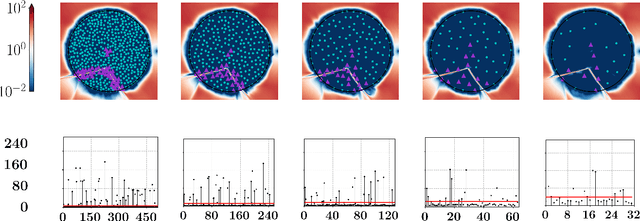
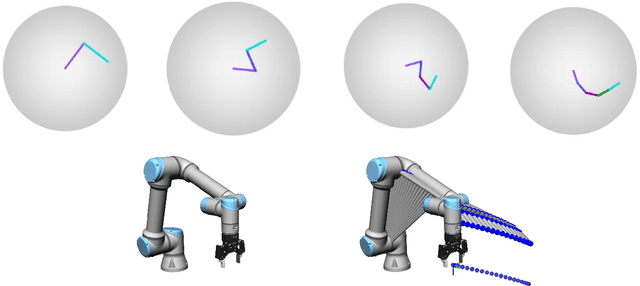
A variety of control tasks such as inverse kinematics (IK), trajectory optimization (TO), and model predictive control (MPC) are commonly formulated as energy minimization problems. Numerical solutions to such problems are well-established. However, these are often too slow to be used directly in real-time applications. The alternative is to learn solution manifolds for control problems in an offline stage. Although this distillation process can be trivially formulated as a behavioral cloning (BC) problem in an imitation learning setting, our experiments highlight a number of significant shortcomings arising due to incompatible local minima, interpolation artifacts, and insufficient coverage of the state space. In this paper, we propose an alternative to BC that is efficient and numerically robust. We formulate the learning of solution manifolds as a minimization of the energy terms of a control objective integrated over the space of problems of interest. We minimize this energy integral with a novel method that combines Monte Carlo-inspired adaptive sampling strategies with the derivatives used to solve individual instances of the control task. We evaluate the performance of our formulation on a series of robotic control problems of increasing complexity, and we highlight its benefits through comparisons against traditional methods such as behavioral cloning and Dataset aggregation (Dagger).