 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Mollification Scheme for Task and Motion Planning
Apr 19, 2023


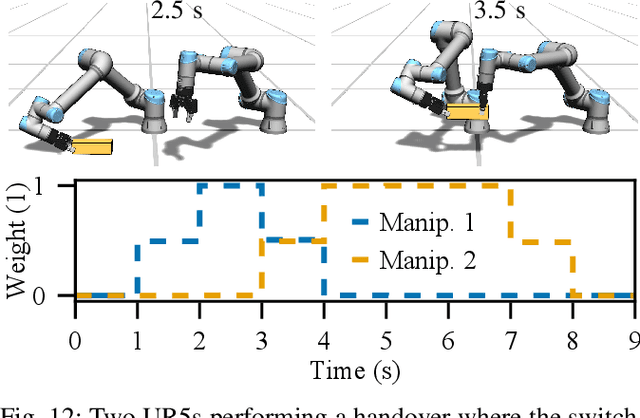
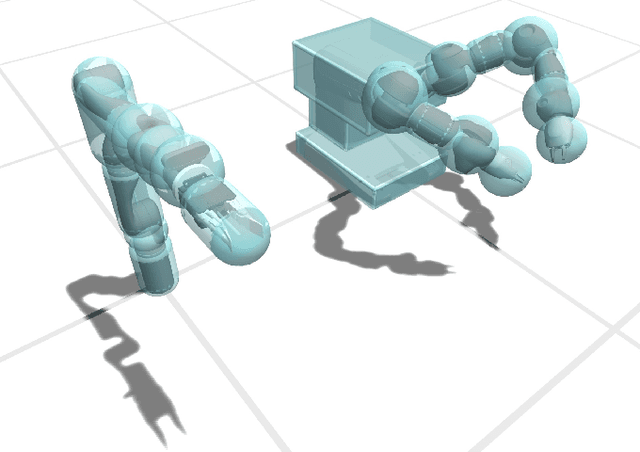
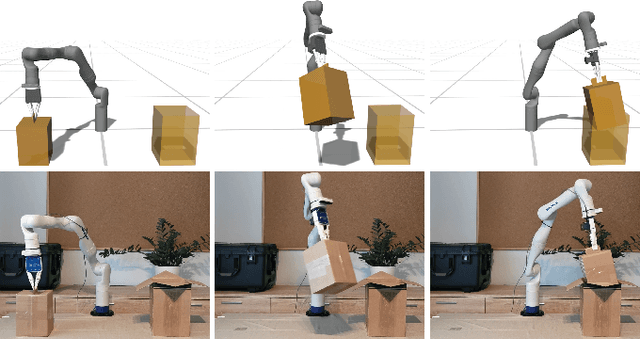
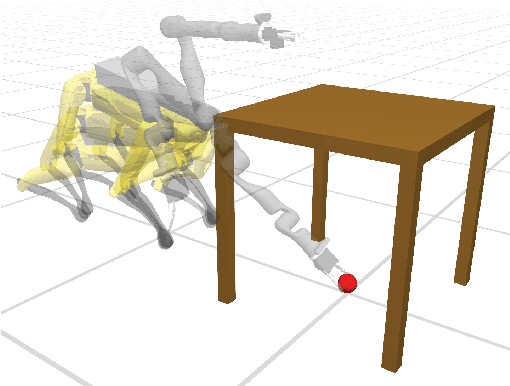
Task and motion planning is one of the key problems in robotics today. It is often formulated as a discrete task allocation problem combined with continuous motion planning. Many existing approaches to TAMP involve explicit descriptions of task primitives that cause discrete changes in the kinematic relationship between the actor and the objects. In this work we propose an alternative approach to TAMP which does not involve explicit enumeration of task primitives. Instead, the actions are represented implicitly as part of the solution to a nonlinear optimization problem. We focus on decision making for robotic manipulators, specifically for pick and place tasks, and show several possible extensions. We explore the efficacy of the model through a number of simulated experiments involving multiple robots, objects and interactions with the environment.
Differentiable Collision Avoidance Using Collision Primitives
Apr 20, 2022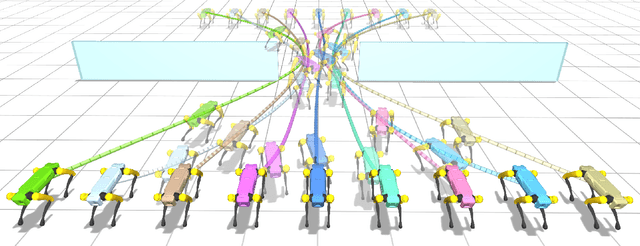
A central aspect of robotic motion planning is collision avoidance, where a multitude of different approaches are currently in use. Optimization-based motion planning is one method, that often heavily relies on distance computations between robots and obstacles. These computations can easily become a bottleneck, as they do not scale well with the complexity of the robots or the environment. To improve performance, many different methods suggested to use collision primitives, i.e. simple shapes that approximate the more complex rigid bodies, and that are simpler to compute distances to and from. However, each pair of primitives requires its own specialized code, and certain pairs are known to suffer from numerical issues. In this paper, we propose an easy-to-use, unified treatment of a wide variety of primitives. We formulate distance computation as a minimization problem, which we solve iteratively. We show how to take derivatives of this minimization problem, allowing it to be seamlessly integrated into a trajectory optimization method. Our experiments show that our method performs favourably, both in terms of timing and the quality of the trajectory. The source code of our implementation will be released upon acceptance.
Obstacle Aware Sampling for Path Planning
Mar 08, 2022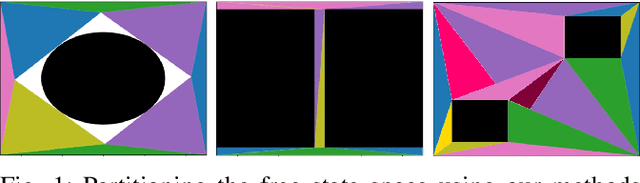
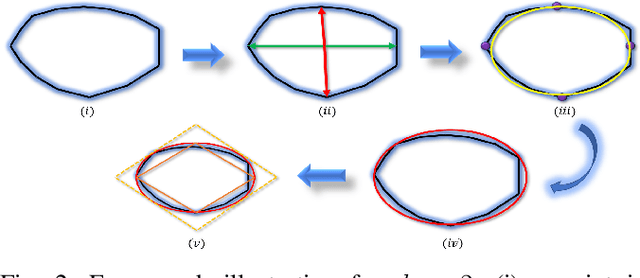
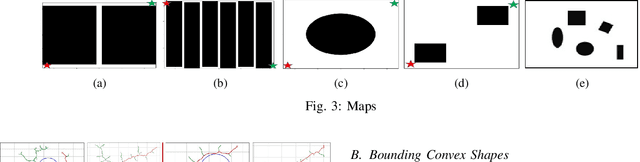
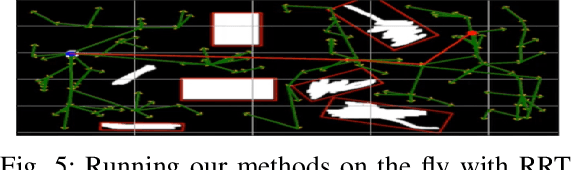
Many path planning algorithms are based on sampling the state space. While this approach is very simple, it can become costly when the obstacles are unknown, since samples hitting these obstacles are wasted. The goal of this paper is to efficiently identify obstacles in a map and remove them from the sampling space. To this end, we propose a pre-processing algorithm for space exploration that enables more efficient sampling. We show that it can boost the performance of other space sampling methods and path planners. Our approach is based on the fact that a convex obstacle can be approximated provably well by its minimum volume enclosing ellipsoid (MVEE), and a non-convex obstacle may be partitioned into convex shapes. Our main contribution is an algorithm that strategically finds a small sample, called the \emph{active-coreset}, that adaptively samples the space via membership-oracle such that the MVEE of the coreset approximates the MVEE of the obstacle. Experimental results confirm the effectiveness of our approach across multiple planners based on Rapidly-exploring random trees, showing significant improvement in terms of time and path length.
Learning Solution Manifolds for Control Problems via Energy Minimization
Mar 07, 2022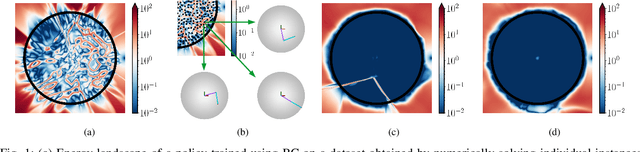
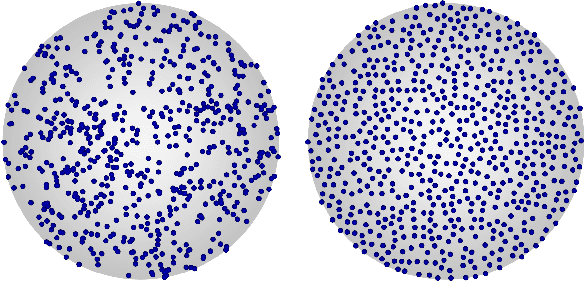
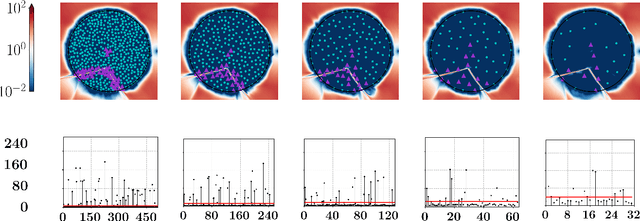
A variety of control tasks such as inverse kinematics (IK), trajectory optimization (TO), and model predictive control (MPC) are commonly formulated as energy minimization problems. Numerical solutions to such problems are well-established. However, these are often too slow to be used directly in real-time applications. The alternative is to learn solution manifolds for control problems in an offline stage. Although this distillation process can be trivially formulated as a behavioral cloning (BC) problem in an imitation learning setting, our experiments highlight a number of significant shortcomings arising due to incompatible local minima, interpolation artifacts, and insufficient coverage of the state space. In this paper, we propose an alternative to BC that is efficient and numerically robust. We formulate the learning of solution manifolds as a minimization of the energy terms of a control objective integrated over the space of problems of interest. We minimize this energy integral with a novel method that combines Monte Carlo-inspired adaptive sampling strategies with the derivatives used to solve individual instances of the control task. We evaluate the performance of our formulation on a series of robotic control problems of increasing complexity, and we highlight its benefits through comparisons against traditional methods such as behavioral cloning and Dataset aggregation (Dagger).
Spatial Computing and Intuitive Interaction: Bringing Mixed Reality and Robotics Together
Feb 03, 2022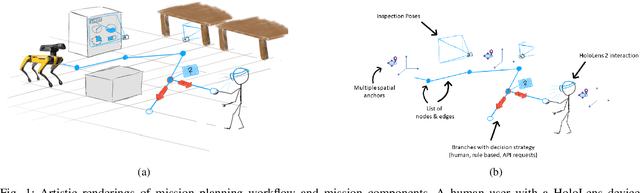
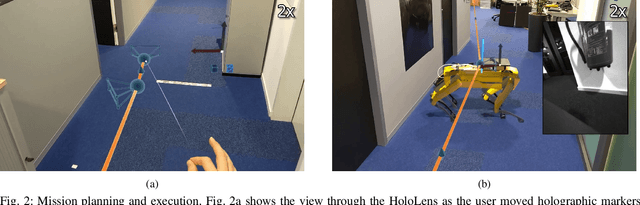


Spatial computing -- the ability of devices to be aware of their surroundings and to represent this digitally -- offers novel capabilities in human-robot interaction. In particular, the combination of spatial computing and egocentric sensing on mixed reality devices enables them to capture and understand human actions and translate these to actions with spatial meaning, which offers exciting new possibilities for collaboration between humans and robots. This paper presents several human-robot systems that utilize these capabilities to enable novel robot use cases: mission planning for inspection, gesture-based control, and immersive teleoperation. These works demonstrate the power of mixed reality as a tool for human-robot interaction, and the potential of spatial computing and mixed reality to drive the future of human-robot interaction.
Realistic Hands: A Hybrid Model for 3D Hand Reconstruction
Aug 31, 2021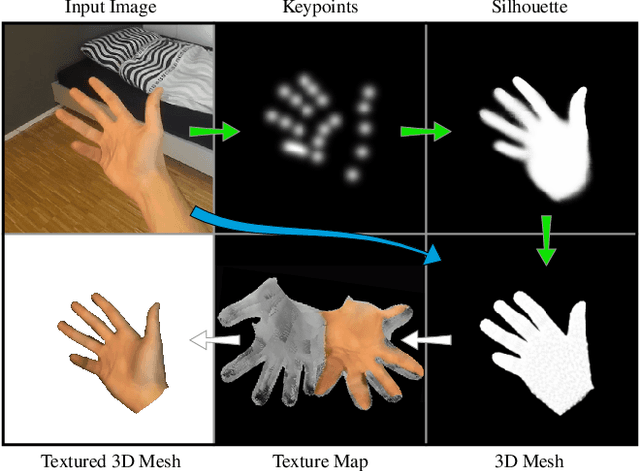
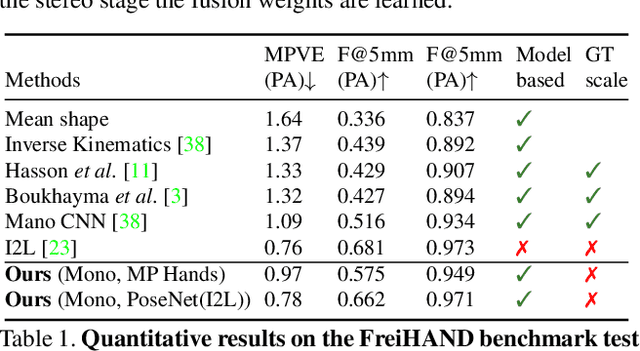
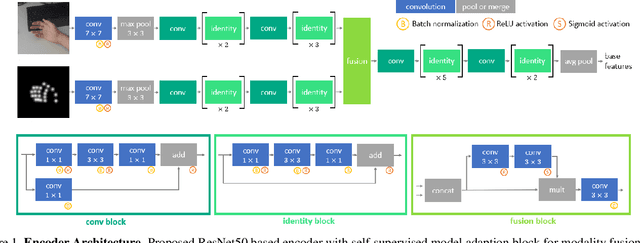
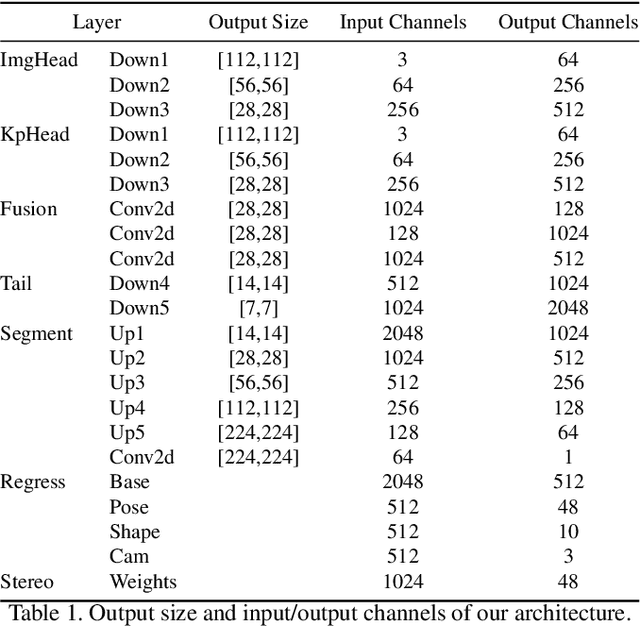
Estimating 3D hand meshes from RGB images robustly is a highly desirable task, made challenging due to the numerous degrees of freedom, and issues such as self similarity and occlusions. Previous methods generally either use parametric 3D hand models or follow a model-free approach. While the former can be considered more robust, e.g. to occlusions, they are less expressive. We propose a hybrid approach, utilizing a deep neural network and differential rendering based optimization to demonstrably achieve the best of both worlds. In addition, we explore Virtual Reality (VR) as an application. Most VR headsets are nowadays equipped with multiple cameras, which we can leverage by extending our method to the egocentric stereo domain. This extension proves to be more resilient to the above mentioned issues. Finally, as a use-case, we show that the improved image-model alignment can be used to acquire the user's hand texture, which leads to a more realistic virtual hand representation.
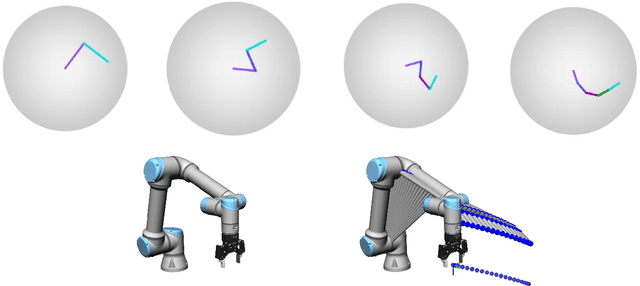
Manipulability optimization for multi-arm teleoperation
Feb 10, 2021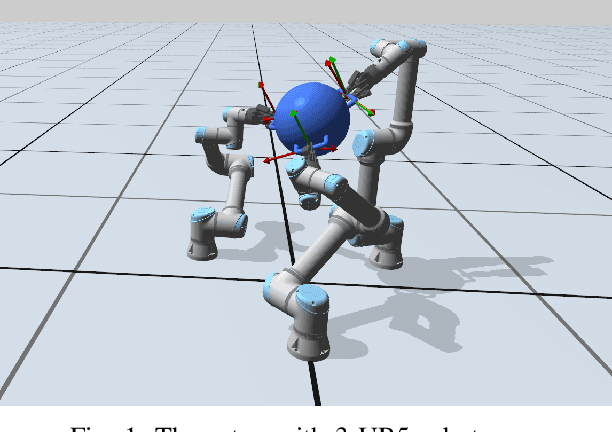
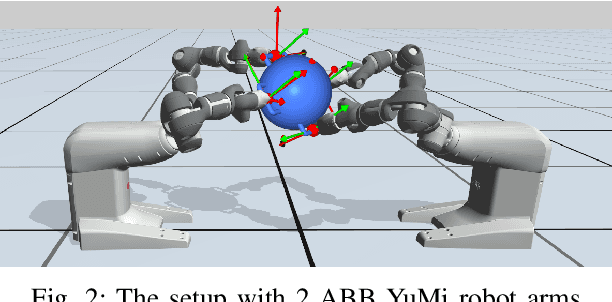
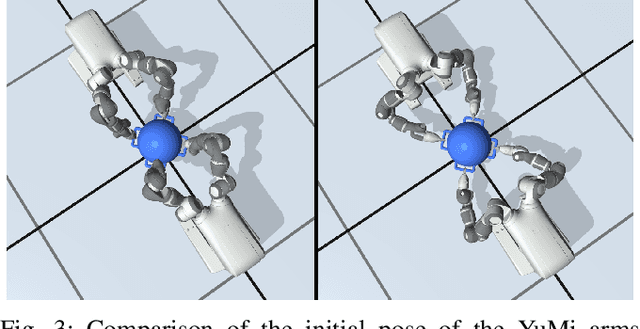
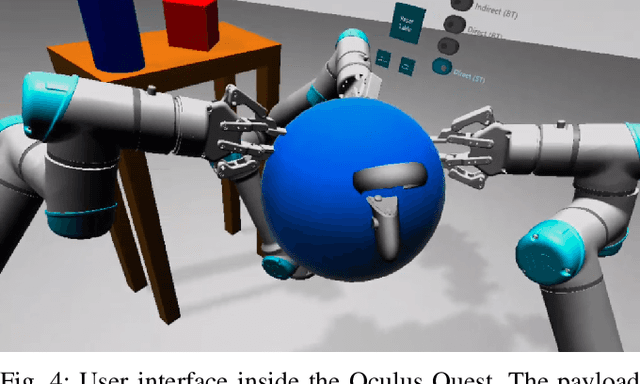
Teleoperation provides a way for human operators to guide robots in situations where full autonomy is challenging or where direct human intervention is required. It can also be an important tool to teach robots in order to achieve autonomous behaviour later on. The increased availability of collaborative robot arms and Virtual Reality (VR) devices provides ample opportunity for development of novel teleoperation methods. Since robot arms are often kinematically different from human arms, mapping human motions to a robot in real-time is not trivial. Additionally, a human operator might steer the robot arm toward singularities or its workspace limits, which can lead to undesirable behaviour. This is further accentuated for the orchestration of multiple robots. In this paper, we present a VR interface targeted to multi-arm payload manipulation, which can closely match real-time input motion. Allowing the user to manipulate the payload rather than mapping their motions to individual arms we are able to simultaneously guide multiple collaborative arms. By releasing a single rotational degree of freedom, and by using a local optimization method, we can improve each arm's manipulability index, which in turn lets us avoid kinematic singularities and workspace limitations. We apply our approach to predefined trajectories as well as real-time teleoperation on different robot arms and compare performance in terms of end effector position error and relevant joint motion metrics.