 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatial Computing and Intuitive Interaction: Bringing Mixed Reality and Robotics Together
Paper and Code
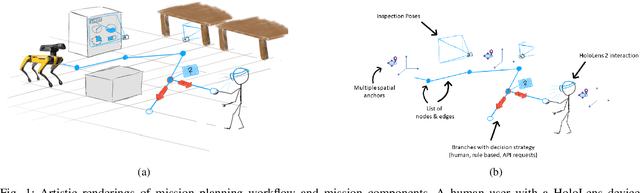
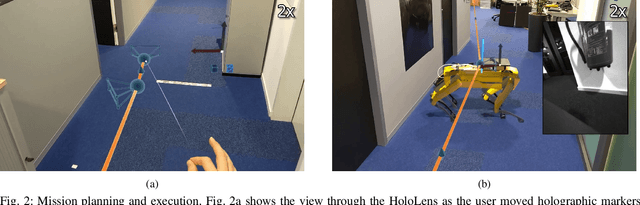


Spatial computing -- the ability of devices to be aware of their surroundings and to represent this digitally -- offers novel capabilities in human-robot interaction. In particular, the combination of spatial computing and egocentric sensing on mixed reality devices enables them to capture and understand human actions and translate these to actions with spatial meaning, which offers exciting new possibilities for collaboration between humans and robots. This paper presents several human-robot systems that utilize these capabilities to enable novel robot use cases: mission planning for inspection, gesture-based control, and immersive teleoperation. These works demonstrate the power of mixed reality as a tool for human-robot interaction, and the potential of spatial computing and mixed reality to drive the future of human-robot interaction.