 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient RWKV-based Representation Learning for 3D Point Clouds
Jun 09, 2026The recent receptance weighted key value (RWKV) model combines RNN-style recurrence, offering a linear-complexity alternative to Transformers' quadratic self-attention for modeling global dependencies. However, when directly applied to point clouds, RWKV, originally developed for sequential text, struggles to capture local geometric structures and model spatial dependencies effectively. To address this, we propose the \textbf{P-RWKV} block, which bridges the gap between sequence modeling and irregular 3D geometry while preserving the efficiency advantages of RWKV. It consists of a Local Perception Expansion (LPE) component to expand contextual perception along the spatio-temporal sequence and a Spatial Context Enhancement (SCE) component to strengthen spatial awareness. To validate the effectiveness of P-RWKV for point cloud understanding, we construct PointER, a single-modality self-supervised representation learning framework whose encoder is composed of stacked P-RWKV blocks. Furthermore, we extend P-RWKV to a cross-modality setting and integrate the proposed core sub-modules into multiple architectures, demonstrating strong plug-and-play flexibility and architectural generality. Extensive experiments show that the P-RWKV block and its key sub-modules achieve competitive performance across various tasks with lower computational cost and inference latency. Code will be released upon acceptance.
Brain-Inspired Capture: Evidence-Driven Neuromimetic Perceptual Simulation for Visual Decoding
Apr 20, 2026Visual decoding of neurophysiological signals is a critical challenge for brain-computer interfaces (BCIs) and computational neuroscience. However, current approaches are often constrained by the systematic and stochastic gaps between neural and visual modalities, largely neglecting the intrinsic computational mechanisms of the Human Visual System (HVS). To address this, we propose Brain-Inspired Capture (BI-Cap), a neuromimetic perceptual simulation paradigm that aligns these modalities by emulating HVS processing. Specifically, we construct a neuromimetic pipeline comprising four biologically plausible dynamic and static transformations, coupled with Mutual Information (MI)-guided dynamic blur regulation to simulate adaptive visual processing. Furthermore, to mitigate the inherent non-stationarity of neural activity, we introduce an evidence-driven latent space representation. This formulation explicitly models uncertainty, thereby ensuring robust neural embeddings. Extensive evaluations on zero-shot brain-to-image retrieval across two public benchmarks demonstrate that BI-Cap substantially outperforms state-of-the-art methods, achieving relative gains of 9.2\% and 8.0\%, respectively. We have released the source code on GitHub through the link https://github.com/flysnow1024/BI-Cap.
Lean Learning Beyond Clouds: Efficient Discrepancy-Conditioned Optical-SAR Fusion for Semantic Segmentation
Mar 21, 2026Cloud occlusion severely degrades the semantic integrity of optical remote sensing imagery. While incorporating Synthetic Aperture Radar (SAR) provides complementary observations, achieving efficient global modeling and reliable cross-modal fusion under cloud interference remains challenging. Existing methods rely on dense global attention to capture long-range dependencies, yet such aggregation indiscriminately propagates cloud-induced noise. Improving robustness typically entails enlarging model capacity, which further increases computational overhead. Given the large-scale and high-resolution nature of remote sensing applications, such computational demands hinder practical deployment, leading to an efficiency-reliability trade-off. To address this dilemma, we propose EDC, an efficiency-oriented and discrepancy-conditioned optical-SAR semantic segmentation framework. A tri-stream encoder with Carrier Tokens enables compact global context modeling with reduced complexity. To prevent noise contamination, we introduce a Discrepancy-Conditioned Hybrid Fusion (DCHF) mechanism that selectively suppresses unreliable regions during global aggregation. In addition, an auxiliary cloud removal branch with teacher-guided distillation enhances semantic consistency under occlusion. Extensive experiments demonstrate that EDC achieves superior accuracy and efficiency, improving mIoU by 0.56\% and 0.88\% on M3M-CR and WHU-OPT-SAR, respectively, while reducing the number of parameters by 46.7\% and accelerating inference by 1.98$\times$. Our implementation is available at https://github.com/mengcx0209/EDC.
M2IR: Proactive All-in-One Image Restoration via Mamba-style Modulation and Mixture-of-Experts
Mar 16, 2026While Transformer-based architectures have dominated recent advances in all-in-one image restoration, they remain fundamentally reactive: propagating degradations rather than proactively suppressing them. In the absence of explicit suppression mechanisms, degraded signals interfere with feature learning, compelling the decoder to balance artifact removal and detail preservation, thereby increasing model complexity and limiting adaptability. To address these challenges, we propose M2IR, a novel restoration framework that proactively regulates degradation propagation during the encoding stage and efficiently eliminates residual degradations during decoding. Specifically, the Mamba-Style Transformer (MST) block performs pixel-wise selective state modulation to mitigate degradations while preserving structural integrity. In parallel, the Adaptive Degradation Expert Collaboration (ADEC) module utilizes degradation-specific experts guided by a DA-CLIP-driven router and complemented by a shared expert to eliminate residual degradations through targeted and cooperative restoration. By integrating the MST block and ADEC module, M2IR transitions from passive reaction to active degradation control, effectively harnessing learned representations to achieve superior generalization, enhanced adaptability, and refined recovery of fine-grained details across diverse all-in-one image restoration benchmarks. Our source codes are available at https://github.com/Im34v/M2IR.
Perceive, Act and Correct: Confidence Is Not Enough for Hyperspectral Classification
Nov 13, 2025Confidence alone is often misleading in hyperspectral image classification, as models tend to mistake high predictive scores for correctness while lacking awareness of uncertainty. This leads to confirmation bias, especially under sparse annotations or class imbalance, where models overfit confident errors and fail to generalize. We propose CABIN (Cognitive-Aware Behavior-Informed learNing), a semi-supervised framework that addresses this limitation through a closed-loop learning process of perception, action, and correction. CABIN first develops perceptual awareness by estimating epistemic uncertainty, identifying ambiguous regions where errors are likely to occur. It then acts by adopting an Uncertainty-Guided Dual Sampling Strategy, selecting uncertain samples for exploration while anchoring confident ones as stable pseudo-labels to reduce bias. To correct noisy supervision, CABIN introduces a Fine-Grained Dynamic Assignment Strategy that categorizes pseudo-labeled data into reliable, ambiguous, and noisy subsets, applying tailored losses to enhance generalization. Experimental results show that a wide range of state-of-the-art methods benefit from the integration of CABIN, with improved labeling efficiency and performance.
BSGS: Bi-stage 3D Gaussian Splatting for Camera Motion Deblurring
Oct 14, 20253D Gaussian Splatting has exhibited remarkable capabilities in 3D scene reconstruction.However, reconstructing high-quality 3D scenes from motion-blurred images caused by camera motion poses a significant challenge.The performance of existing 3DGS-based deblurring methods are limited due to their inherent mechanisms, such as extreme dependence on the accuracy of camera poses and inability to effectively control erroneous Gaussian primitives densification caused by motion blur.To solve these problems, we introduce a novel framework, Bi-Stage 3D Gaussian Splatting, to accurately reconstruct 3D scenes from motion-blurred images.BSGS contains two stages. First, Camera Pose Refinement roughly optimizes camera poses to reduce motion-induced distortions. Second, with fixed rough camera poses, Global RigidTransformation further corrects motion-induced blur distortions.To alleviate multi-subframe gradient conflicts, we propose a subframe gradient aggregation strategy to optimize both stages.Furthermore, a space-time bi-stage optimization strategy is introduced to dynamically adjust primitive densification thresholds and prevent premature noisy Gaussian generation in blurred regions. Comprehensive experiments verify the effectiveness of our proposed deblurring method and show its superiority over the state of the arts.
PartSAM: A Scalable Promptable Part Segmentation Model Trained on Native 3D Data
Sep 26, 2025Segmenting 3D objects into parts is a long-standing challenge in computer vision. To overcome taxonomy constraints and generalize to unseen 3D objects, recent works turn to open-world part segmentation. These approaches typically transfer supervision from 2D foundation models, such as SAM, by lifting multi-view masks into 3D. However, this indirect paradigm fails to capture intrinsic geometry, leading to surface-only understanding, uncontrolled decomposition, and limited generalization. We present PartSAM, the first promptable part segmentation model trained natively on large-scale 3D data. Following the design philosophy of SAM, PartSAM employs an encoder-decoder architecture in which a triplane-based dual-branch encoder produces spatially structured tokens for scalable part-aware representation learning. To enable large-scale supervision, we further introduce a model-in-the-loop annotation pipeline that curates over five million 3D shape-part pairs from online assets, providing diverse and fine-grained labels. This combination of scalable architecture and diverse 3D data yields emergent open-world capabilities: with a single prompt, PartSAM achieves highly accurate part identification, and in a Segment-Every-Part mode, it automatically decomposes shapes into both surface and internal structures. Extensive experiments show that PartSAM outperforms state-of-the-art methods by large margins across multiple benchmarks, marking a decisive step toward foundation models for 3D part understanding. Our code and model will be released soon.
MonoRelief V2: Leveraging Real Data for High-Fidelity Monocular Relief Recovery
Aug 27, 2025

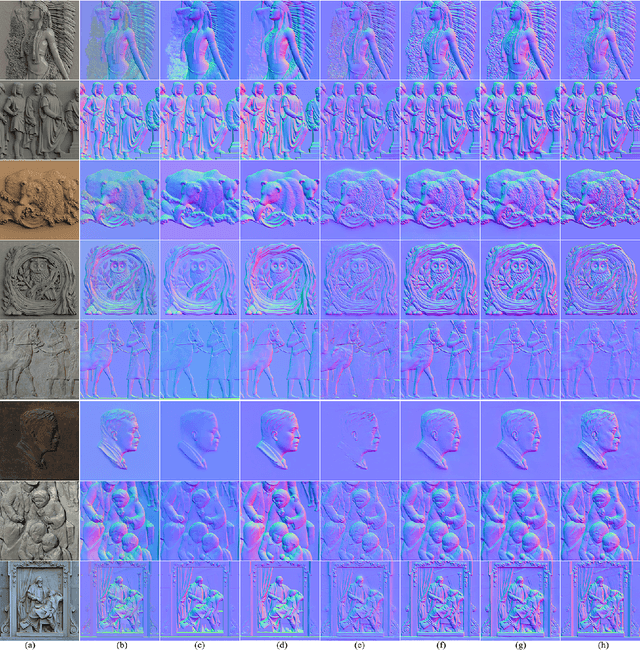

This paper presents MonoRelief V2, an end-to-end model designed for directly recovering 2.5D reliefs from single images under complex material and illumination variations. In contrast to its predecessor, MonoRelief V1 [1], which was solely trained on synthetic data, MonoRelief V2 incorporates real data to achieve improved robustness, accuracy and efficiency. To overcome the challenge of acquiring large-scale real-world dataset, we generate approximately 15,000 pseudo real images using a text-to-image generative model, and derive corresponding depth pseudo-labels through fusion of depth and normal predictions. Furthermore, we construct a small-scale real-world dataset (800 samples) via multi-view reconstruction and detail refinement. MonoRelief V2 is then progressively trained on the pseudo-real and real-world datasets. Comprehensive experiments demonstrate its state-of-the-art performance both in depth and normal predictions, highlighting its strong potential for a range of downstream applications. Code is at: https://github.com/glp1001/MonoreliefV2.
ColorGS: High-fidelity Surgical Scene Reconstruction with Colored Gaussian Splatting
Aug 26, 2025High-fidelity reconstruction of deformable tissues from endoscopic videos remains challenging due to the limitations of existing methods in capturing subtle color variations and modeling global deformations. While 3D Gaussian Splatting (3DGS) enables efficient dynamic reconstruction, its fixed per-Gaussian color assignment struggles with intricate textures, and linear deformation modeling fails to model consistent global deformation. To address these issues, we propose ColorGS, a novel framework that integrates spatially adaptive color encoding and enhanced deformation modeling for surgical scene reconstruction. First, we introduce Colored Gaussian Primitives, which employ dynamic anchors with learnable color parameters to adaptively encode spatially varying textures, significantly improving color expressiveness under complex lighting and tissue similarity. Second, we design an Enhanced Deformation Model (EDM) that combines time-aware Gaussian basis functions with learnable time-independent deformations, enabling precise capture of both localized tissue deformations and global motion consistency caused by surgical interactions. Extensive experiments on DaVinci robotic surgery videos and benchmark datasets (EndoNeRF, StereoMIS) demonstrate that ColorGS achieves state-of-the-art performance, attaining a PSNR of 39.85 (1.5 higher than prior 3DGS-based methods) and superior SSIM (97.25\%) while maintaining real-time rendering efficiency. Our work advances surgical scene reconstruction by balancing high fidelity with computational practicality, critical for intraoperative guidance and AR/VR applications.
Wavelet-guided Misalignment-aware Network for Visible-Infrared Object Detection
Jul 27, 2025Visible-infrared object detection aims to enhance the detection robustness by exploiting the complementary information of visible and infrared image pairs. However, its performance is often limited by frequent misalignments caused by resolution disparities, spatial displacements, and modality inconsistencies. To address this issue, we propose the Wavelet-guided Misalignment-aware Network (WMNet), a unified framework designed to adaptively address different cross-modal misalignment patterns. WMNet incorporates wavelet-based multi-frequency analysis and modality-aware fusion mechanisms to improve the alignment and integration of cross-modal features. By jointly exploiting low and high-frequency information and introducing adaptive guidance across modalities, WMNet alleviates the adverse effects of noise, illumination variation, and spatial misalignment. Furthermore, it enhances the representation of salient target features while suppressing spurious or misleading information, thereby promoting more accurate and robust detection. Extensive evaluations on the DVTOD, DroneVehicle, and M3FD datasets demonstrate that WMNet achieves state-of-the-art performance on misaligned cross-modal object detection tasks, confirming its effectiveness and practical applicability.