 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNOVA3R: Non-pixel-aligned Visual Transformer for Amodal 3D Reconstruction
Mar 05, 2026We present NOVA3R, an effective approach for non-pixel-aligned 3D reconstruction from a set of unposed images in a feed-forward manner. Unlike pixel-aligned methods that tie geometry to per-ray predictions, our formulation learns a global, view-agnostic scene representation that decouples reconstruction from pixel alignment. This addresses two key limitations in pixel-aligned 3D: (1) it recovers both visible and invisible points with a complete scene representation, and (2) it produces physically plausible geometry with fewer duplicated structures in overlapping regions. To achieve this, we introduce a scene-token mechanism that aggregates information across unposed images and a diffusion-based 3D decoder that reconstructs complete, non-pixel-aligned point clouds. Extensive experiments on both scene-level and object-level datasets demonstrate that NOVA3R outperforms state-of-the-art methods in terms of reconstruction accuracy and completeness.
Flow4R: Unifying 4D Reconstruction and Tracking with Scene Flow
Feb 15, 2026Reconstructing and tracking dynamic 3D scenes remains a fundamental challenge in computer vision. Existing approaches often decouple geometry from motion: multi-view reconstruction methods assume static scenes, while dynamic tracking frameworks rely on explicit camera pose estimation or separate motion models. We propose Flow4R, a unified framework that treats camera-space scene flow as the central representation linking 3D structure, object motion, and camera motion. Flow4R predicts a minimal per-pixel property set-3D point position, scene flow, pose weight, and confidence-from two-view inputs using a Vision Transformer. This flow-centric formulation allows local geometry and bidirectional motion to be inferred symmetrically with a shared decoder in a single forward pass, without requiring explicit pose regressors or bundle adjustment. Trained jointly on static and dynamic datasets, Flow4R achieves state-of-the-art performance on 4D reconstruction and tracking tasks, demonstrating the effectiveness of the flow-central representation for spatiotemporal scene understanding.
Back on Track: Bundle Adjustment for Dynamic Scene Reconstruction
Apr 20, 2025Traditional SLAM systems, which rely on bundle adjustment, struggle with highly dynamic scenes commonly found in casual videos. Such videos entangle the motion of dynamic elements, undermining the assumption of static environments required by traditional systems. Existing techniques either filter out dynamic elements or model their motion independently. However, the former often results in incomplete reconstructions, whereas the latter can lead to inconsistent motion estimates. Taking a novel approach, this work leverages a 3D point tracker to separate the camera-induced motion from the observed motion of dynamic objects. By considering only the camera-induced component, bundle adjustment can operate reliably on all scene elements as a result. We further ensure depth consistency across video frames with lightweight post-processing based on scale maps. Our framework combines the core of traditional SLAM -- bundle adjustment -- with a robust learning-based 3D tracker front-end. Integrating motion decomposition, bundle adjustment and depth refinement, our unified framework, BA-Track, accurately tracks the camera motion and produces temporally coherent and scale-consistent dense reconstructions, accommodating both static and dynamic elements. Our experiments on challenging datasets reveal significant improvements in camera pose estimation and 3D reconstruction accuracy.
GlORIE-SLAM: Globally Optimized RGB-only Implicit Encoding Point Cloud SLAM
Mar 30, 2024



Recent advancements in RGB-only dense Simultaneous Localization and Mapping (SLAM) have predominantly utilized grid-based neural implicit encodings and/or struggle to efficiently realize global map and pose consistency. To this end, we propose an efficient RGB-only dense SLAM system using a flexible neural point cloud scene representation that adapts to keyframe poses and depth updates, without needing costly backpropagation. Another critical challenge of RGB-only SLAM is the lack of geometric priors. To alleviate this issue, with the aid of a monocular depth estimator, we introduce a novel DSPO layer for bundle adjustment which optimizes the pose and depth of keyframes along with the scale of the monocular depth. Finally, our system benefits from loop closure and online global bundle adjustment and performs either better or competitive to existing dense neural RGB SLAM methods in tracking, mapping and rendering accuracy on the Replica, TUM-RGBD and ScanNet datasets. The source code will be made available.
NICE-SLAM with Adaptive Feature Grids
Jun 10, 2023



NICE-SLAM is a dense visual SLAM system that combines the advantages of neural implicit representations and hierarchical grid-based scene representation. However, the hierarchical grid features are densely stored, leading to memory explosion problems when adapting the framework to large scenes. In our project, we present sparse NICE-SLAM, a sparse SLAM system incorporating the idea of Voxel Hashing into NICE-SLAM framework. Instead of initializing feature grids in the whole space, voxel features near the surface are adaptively added and optimized. Experiments demonstrated that compared to NICE-SLAM algorithm, our approach takes much less memory and achieves comparable reconstruction quality on the same datasets. Our implementation is available at https://github.com/zhangganlin/NICE-SLAM-with-Adaptive-Feature-Grids.
Accessible Robot Control in Mixed Reality
Jun 04, 2023



A novel method to control the Spot robot of Boston Dynamics by Hololens 2 is proposed. This method is mainly designed for people with physical disabilities, users can control the robot's movement and robot arm without using their hands. The eye gaze tracking and head motion tracking technologies of Hololens 2 are utilized for sending control commands. The movement of the robot would follow the eye gaze and the robot arm would mimic the pose of the user's head. Through our experiment, our method is comparable with the traditional control method by joystick in both time efficiency and user experience. Demo can be found on our project webpage: https://zhangganlin.github.io/Holo-Spot-Page/index.html
Revisiting Rotation Averaging: Uncertainties and Robust Losses
Mar 09, 2023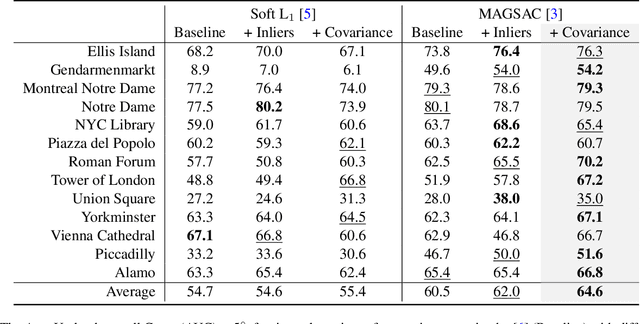
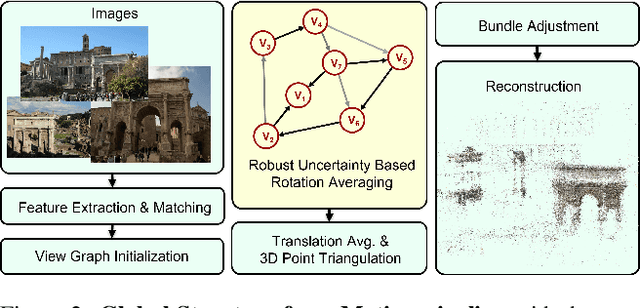
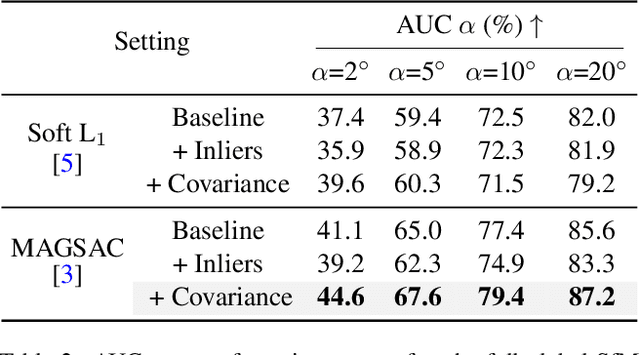
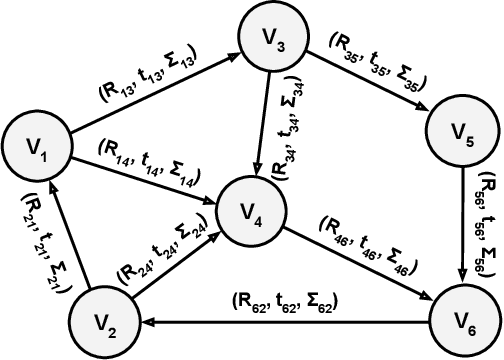
In this paper, we revisit the rotation averaging problem applied in global Structure-from-Motion pipelines. We argue that the main problem of current methods is the minimized cost function that is only weakly connected with the input data via the estimated epipolar geometries.We propose to better model the underlying noise distributions by directly propagating the uncertainty from the point correspondences into the rotation averaging. Such uncertainties are obtained for free by considering the Jacobians of two-view refinements. Moreover, we explore integrating a variant of the MAGSAC loss into the rotation averaging problem, instead of using classical robust losses employed in current frameworks. The proposed method leads to results superior to baselines, in terms of accuracy, on large-scale public benchmarks. The code is public. https://github.com/zhangganlin/GlobalSfMpy
Multi-Person Passive WiFi Indoor Localization with Intelligent Reflecting Surface
Jan 05, 2022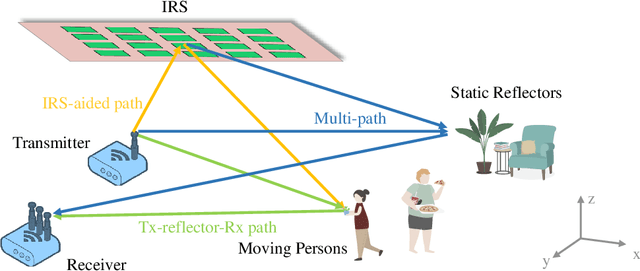
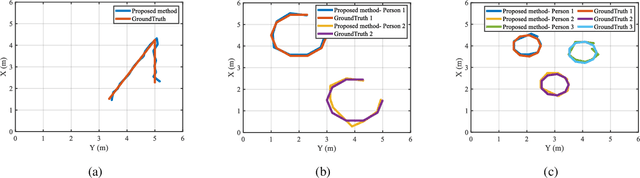
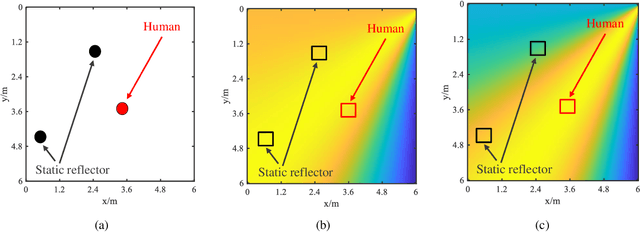
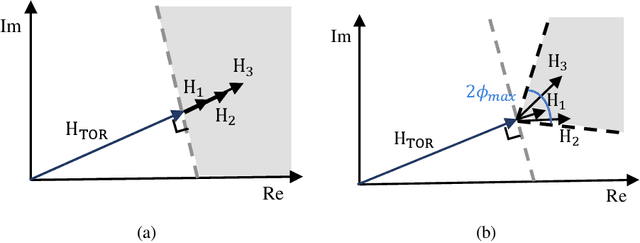
The past years have witnessed increasing research interest in achieving passive human localization with commodity WiFi devices. However, due to the fundamental limited spatial resolution of WiFi signals, it is still very difficult to achieve accurate localization with existing commodity WiFi devices. To tackle this problem, in this paper, we propose to exploit the degree of freedom provided by the Intelligent Reflecting Surface (IRS), which is composed of a large number of controllable reflective elements, to modulate the spatial distribution of WiFi signals and thus break down the spatial resolution limitation of WiFi signals to achieve accurate localization. Specifically, in the single-person scenario, we derive the closed-form solution to optimally control the phase shift of the IRS elements. In the multi-person scenario, we propose a Side-lobe Cancellation Algorithm to eliminate the near-far effect to achieve accurate localization of multiple persons in an iterative manner. Extensive simulation results demonstrate that without any change to the existing WiFi infrastructure, the proposed framework can locate multiple moving persons passively with sub-centimeter accuracy under multipath interference and random noise.