 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeELLIPSE: Evidential Learning for Robust Waypoints and Uncertainties
Mar 04, 2026Robust waypoint prediction is crucial for mobile robots operating in open-world, safety-critical settings. While Imitation Learning (IL) methods have demonstrated great success in practice, they are susceptible to distribution shifts: the policy can become dangerously overconfident in unfamiliar states. In this paper, we present \textit{ELLIPSE}, a method building on multivariate deep evidential regression to output waypoints and multivariate Student-t predictive distributions in a single forward pass. To reduce covariate-shift-induced overconfidence under viewpoint and pose perturbations near expert trajectories, we introduce a lightweight domain augmentation procedure that synthesizes plausible viewpoint/pose variations without collecting additional demonstrations. To improve uncertainty reliability under environment/domain shift (e.g., unseen staircases), we apply a post-hoc isotonic recalibration on probability integral transform (PIT) values so that prediction sets remain plausible during deployment. We ground the discussion and experiments in staircase waypoint prediction, where obtaining robust waypoint and uncertainty is pivotal. Extensive real world evaluations show that \textit{ELLIPSE} improves both task success rate and uncertainty coverage compared to baselines.
Learning from Demonstration with Hierarchical Policy Abstractions Toward High-Performance and Courteous Autonomous Racing
Nov 07, 2024



Fully autonomous racing demands not only high-speed driving but also fair and courteous maneuvers. In this paper, we propose an autonomous racing framework that learns complex racing behaviors from expert demonstrations using hierarchical policy abstractions. At the trajectory level, our policy model predicts a dense distribution map indicating the likelihood of trajectories learned from offline demonstrations. The maximum likelihood trajectory is then passed to the control-level policy, which generates control inputs in a residual fashion, considering vehicle dynamics at the limits of performance. We evaluate our framework in a high-fidelity racing simulator and compare it against competing baselines in challenging multi-agent adversarial scenarios. Quantitative and qualitative results show that our trajectory planning policy significantly outperforms the baselines, and the residual control policy improves lap time and tracking accuracy. Moreover, challenging closed-loop experiments with ten opponents show that our framework can overtake other vehicles by understanding nuanced interactions, effectively balancing performance and courtesy like professional drivers.
Pixel to Elevation: Learning to Predict Elevation Maps at Long Range using Images for Autonomous Offroad Navigation
Jan 30, 2024Understanding terrain topology at long-range is crucial for the success of off-road robotic missions, especially when navigating at high-speeds. LiDAR sensors, which are currently heavily relied upon for geometric mapping, provide sparse measurements when mapping at greater distances. To address this challenge, we present a novel learning-based approach capable of predicting terrain elevation maps at long-range using only onboard egocentric images in real-time. Our proposed method is comprised of three main elements. First, a transformer-based encoder is introduced that learns cross-view associations between the egocentric views and prior bird-eye-view elevation map predictions. Second, an orientation-aware positional encoding is proposed to incorporate the 3D vehicle pose information over complex unstructured terrain with multi-view visual image features. Lastly, a history-augmented learn-able map embedding is proposed to achieve better temporal consistency between elevation map predictions to facilitate the downstream navigational tasks. We experimentally validate the applicability of our proposed approach for autonomous offroad robotic navigation in complex and unstructured terrain using real-world offroad driving data. Furthermore, the method is qualitatively and quantitatively compared against the current state-of-the-art methods. Extensive field experiments demonstrate that our method surpasses baseline models in accurately predicting terrain elevation while effectively capturing the overall terrain topology at long-ranges. Finally, ablation studies are conducted to highlight and understand the effect of key components of the proposed approach and validate their suitability to improve offroad robotic navigation capabilities.
InGram: Inductive Knowledge Graph Embedding via Relation Graphs
Jun 01, 2023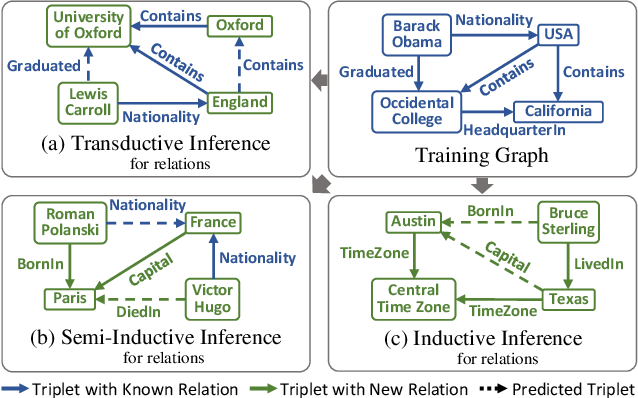
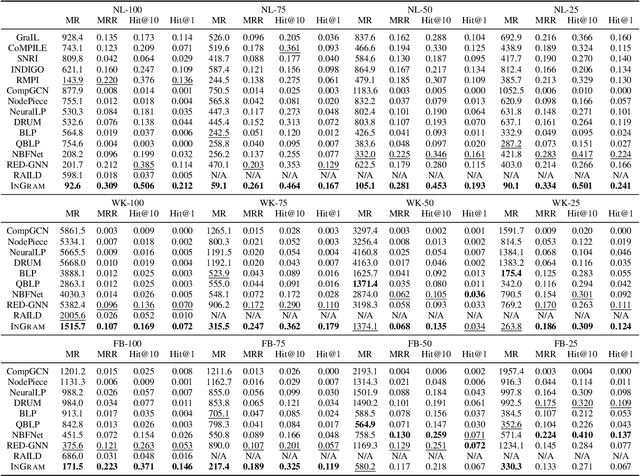
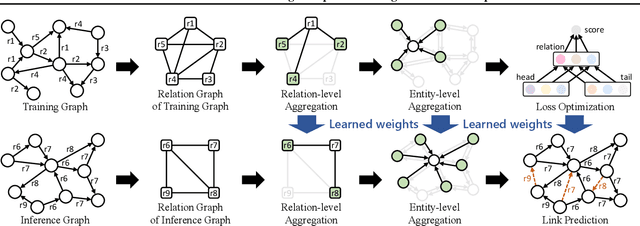
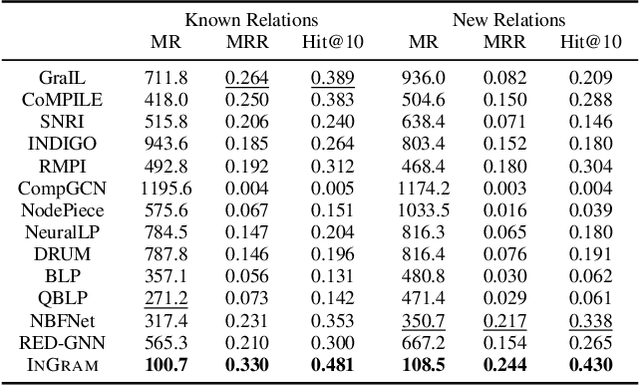
Inductive knowledge graph completion has been considered as the task of predicting missing triplets between new entities that are not observed during training. While most inductive knowledge graph completion methods assume that all entities can be new, they do not allow new relations to appear at inference time. This restriction prohibits the existing methods from appropriately handling real-world knowledge graphs where new entities accompany new relations. In this paper, we propose an INductive knowledge GRAph eMbedding method, InGram, that can generate embeddings of new relations as well as new entities at inference time. Given a knowledge graph, we define a relation graph as a weighted graph consisting of relations and the affinity weights between them. Based on the relation graph and the original knowledge graph, InGram learns how to aggregate neighboring embeddings to generate relation and entity embeddings using an attention mechanism. Experimental results show that InGram outperforms 14 different state-of-the-art methods on varied inductive learning scenarios.
Representation Learning on Hyper-Relational and Numeric Knowledge Graphs with Transformers
Jun 01, 2023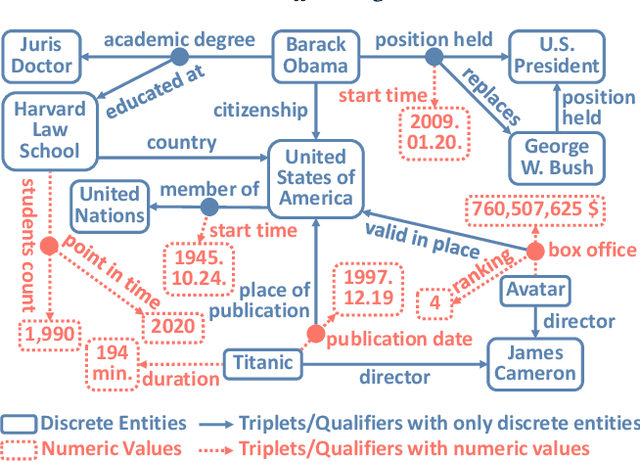
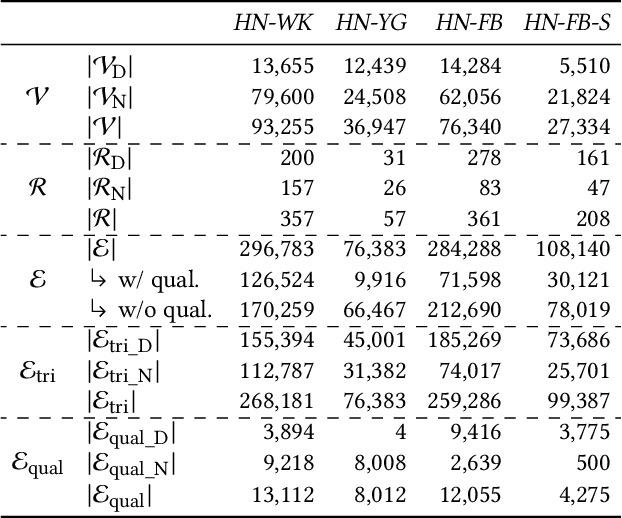
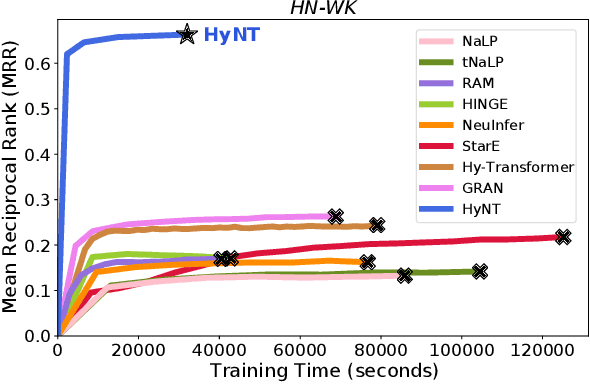
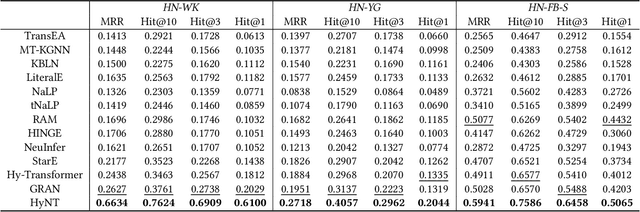
A hyper-relational knowledge graph has been recently studied where a triplet is associated with a set of qualifiers; a qualifier is composed of a relation and an entity, providing auxiliary information for a triplet. While existing hyper-relational knowledge graph embedding methods assume that the entities are discrete objects, some information should be represented using numeric values, e.g., (J.R.R., was born in, 1892). Also, a triplet (J.R.R., educated at, Oxford Univ.) can be associated with a qualifier such as (start time, 1911). In this paper, we propose a unified framework named HyNT that learns representations of a hyper-relational knowledge graph containing numeric literals in either triplets or qualifiers. We define a context transformer and a prediction transformer to learn the representations based not only on the correlations between a triplet and its qualifiers but also on the numeric information. By learning compact representations of triplets and qualifiers and feeding them into the transformers, we reduce the computation cost of using transformers. Using HyNT, we can predict missing numeric values in addition to missing entities or relations in a hyper-relational knowledge graph. Experimental results show that HyNT significantly outperforms state-of-the-art methods on real-world datasets.
Learning Representations of Bi-Level Knowledge Graphs for Reasoning beyond Link Prediction
Feb 06, 2023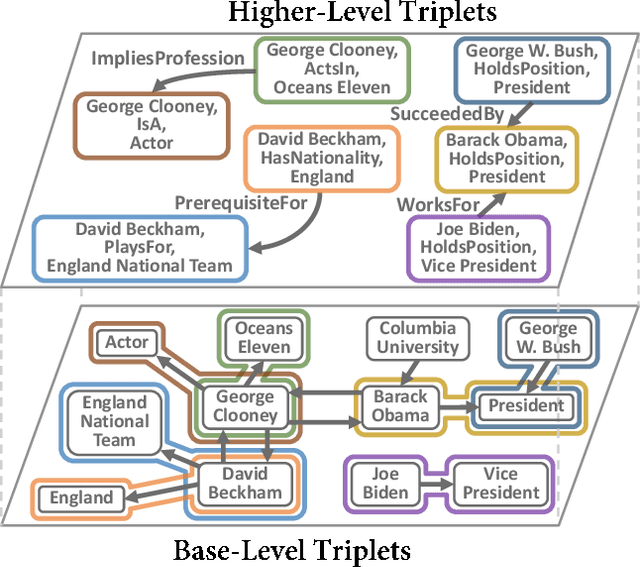
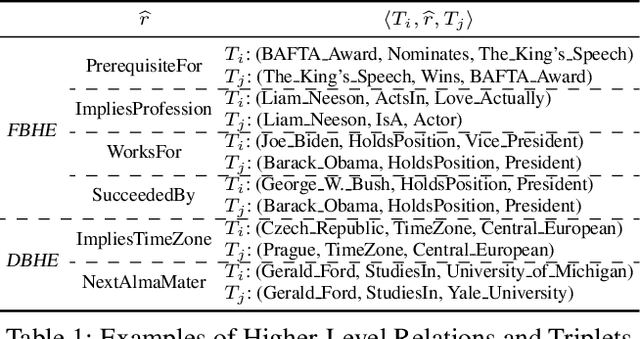
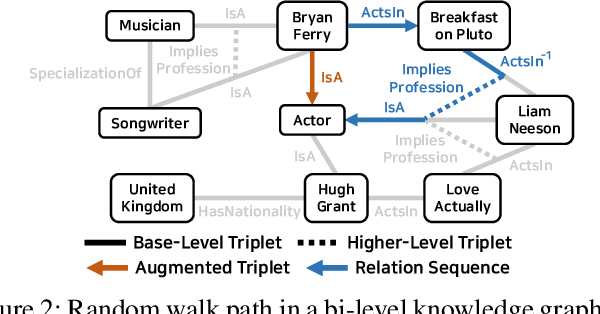
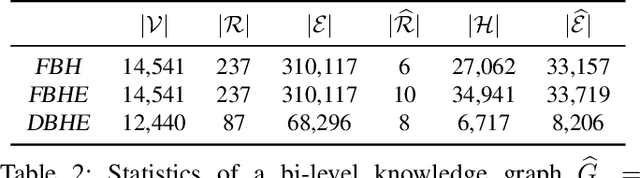
Knowledge graphs represent known facts using triplets. While existing knowledge graph embedding methods only consider the connections between entities, we propose considering the relationships between triplets. For example, let us consider two triplets $T_1$ and $T_2$ where $T_1$ is (Academy_Awards, Nominates, Avatar) and $T_2$ is (Avatar, Wins, Academy_Awards). Given these two base-level triplets, we see that $T_1$ is a prerequisite for $T_2$. In this paper, we define a higher-level triplet to represent a relationship between triplets, e.g., $\langle T_1$, PrerequisiteFor, $T_2\rangle$ where PrerequisiteFor is a higher-level relation. We define a bi-level knowledge graph that consists of the base-level and the higher-level triplets. We also propose a data augmentation strategy based on the random walks on the bi-level knowledge graph to augment plausible triplets. Our model called BiVE learns embeddings by taking into account the structures of the base-level and the higher-level triplets, with additional consideration of the augmented triplets. We propose two new tasks: triplet prediction and conditional link prediction. Given a triplet $T_1$ and a higher-level relation, the triplet prediction predicts a triplet that is likely to be connected to $T_1$ by the higher-level relation, e.g., $\langle T_1$, PrerequisiteFor, ?$\rangle$. The conditional link prediction predicts a missing entity in a triplet conditioned on another triplet, e.g., $\langle T_1$, PrerequisiteFor, (Avatar, Wins, ?)$\rangle$. Experimental results show that BiVE significantly outperforms all other methods in the two new tasks and the typical base-level link prediction in real-world bi-level knowledge graphs.
Data-Driven Model Identification via Hyperparameter Optimization for Autonomous Racing Systems
Jan 06, 2023In this letter, we propose a model identification method via hyperparameter optimization (MIHO). Our method adopts an efficient explore-exploit strategy to identify the parameters of dynamic models in a data-driven optimization manner. We utilize MIHO for model parameter identification of the AV-21, a full-scaled autonomous race vehicle. We then incorporate the optimized parameters for the design of model-based planning and control systems of our platform. In experiments, the learned parametric models demonstrate good fitness to given datasets and show generalization ability in unseen dynamic scenarios. We further conduct extensive field tests to validate our model-based system. The tests show that our race systems leverage the learned model dynamics and successfully perform obstacle avoidance and high-speed driving over $200 km/h$ at the Indianapolis Motor Speedway and Las Vegas Motor Speedway. The source code for MIHO and videos of the tests are available at https://github.com/hynkis/MIHO.