 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOARSE: Collaborative Pseudo-Labeling with Coarse Real Labels for Off-Road Semantic Segmentation
Mar 05, 2025
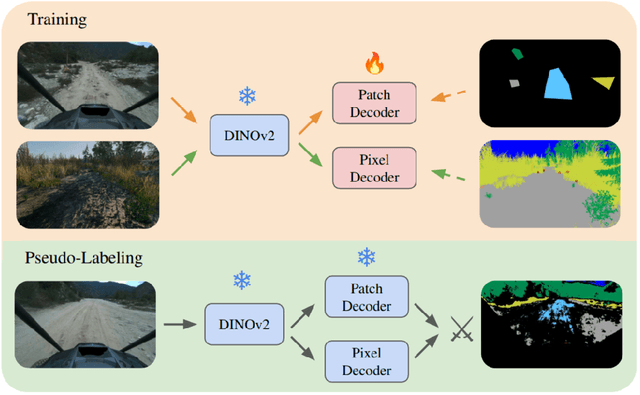


Autonomous off-road navigation faces challenges due to diverse, unstructured environments, requiring robust perception with both geometric and semantic understanding. However, scarce densely labeled semantic data limits generalization across domains. Simulated data helps, but introduces domain adaptation issues. We propose COARSE, a semi-supervised domain adaptation framework for off-road semantic segmentation, leveraging sparse, coarse in-domain labels and densely labeled out-of-domain data. Using pretrained vision transformers, we bridge domain gaps with complementary pixel-level and patch-level decoders, enhanced by a collaborative pseudo-labeling strategy on unlabeled data. Evaluations on RUGD and Rellis-3D datasets show significant improvements of 9.7\% and 8.4\% respectively, versus only using coarse data. Tests on real-world off-road vehicle data in a multi-biome setting further demonstrate COARSE's applicability.
Enabling Novel Mission Operations and Interactions with ROSA: The Robot Operating System Agent
Oct 09, 2024The advancement of robotic systems has revolutionized numerous industries, yet their operation often demands specialized technical knowledge, limiting accessibility for non-expert users. This paper introduces ROSA (Robot Operating System Agent), an AI-powered agent that bridges the gap between the Robot Operating System (ROS) and natural language interfaces. By leveraging state-of-the-art language models and integrating open-source frameworks, ROSA enables operators to interact with robots using natural language, translating commands into actions and interfacing with ROS through well-defined tools. ROSA's design is modular and extensible, offering seamless integration with both ROS1 and ROS2, along with safety mechanisms like parameter validation and constraint enforcement to ensure secure, reliable operations. While ROSA is originally designed for ROS, it can be extended to work with other robotics middle-wares to maximize compatibility across missions. ROSA enhances human-robot interaction by democratizing access to complex robotic systems, empowering users of all expertise levels with multi-modal capabilities such as speech integration and visual perception. Ethical considerations are thoroughly addressed, guided by foundational principles like Asimov's Three Laws of Robotics, ensuring that AI integration promotes safety, transparency, privacy, and accountability. By making robotic technology more user-friendly and accessible, ROSA not only improves operational efficiency but also sets a new standard for responsible AI use in robotics and potentially future mission operations. This paper introduces ROSA's architecture and showcases initial mock-up operations in JPL's Mars Yard, a laboratory, and a simulation using three different robots. The core ROSA library is available as open-source.
Robust Uncertainty Estimation for Classification of Maritime Objects
Jul 03, 2023
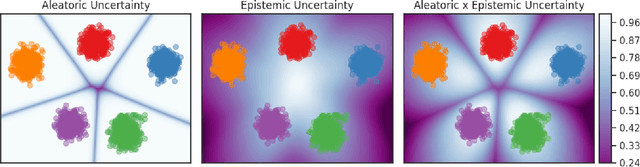
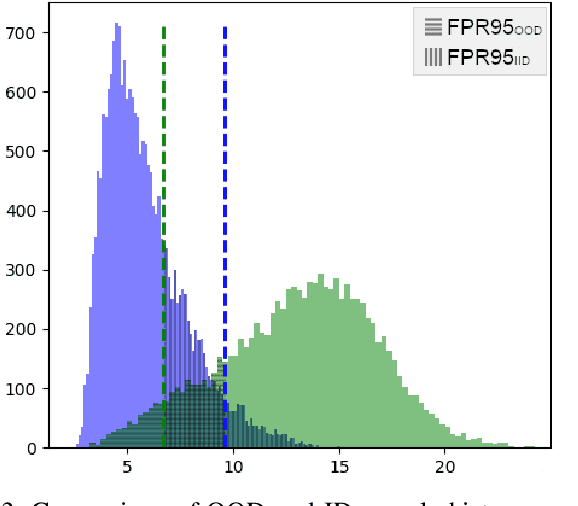
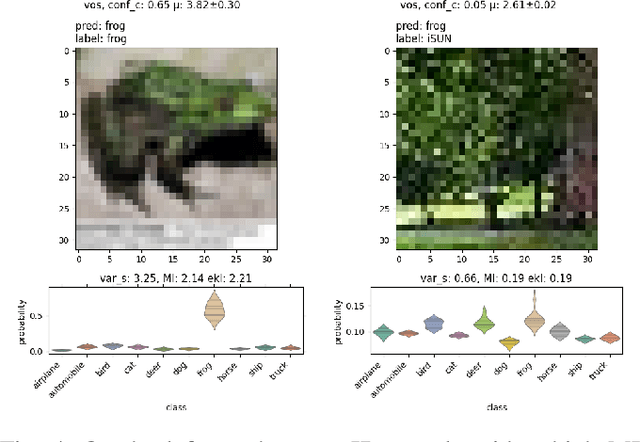
We explore the use of uncertainty estimation in the maritime domain, showing the efficacy on toy datasets (CIFAR10) and proving it on an in-house dataset, SHIPS. We present a method joining the intra-class uncertainty achieved using Monte Carlo Dropout, with recent discoveries in the field of outlier detection, to gain more holistic uncertainty measures. We explore the relationship between the introduced uncertainty measures and examine how well they work on CIFAR10 and in a real-life setting. Our work improves the FPR95 by 8% compared to the current highest-performing work when the models are trained without out-of-distribution data. We increase the performance by 77% compared to a vanilla implementation of the Wide ResNet. We release the SHIPS dataset and show the effectiveness of our method by improving the FPR95 by 44.2% with respect to the baseline. Our approach is model agnostic, easy to implement, and often does not require model retraining.