 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonte Carlo Tree Search with Spectral Expansion for Planning with Dynamical Systems
Dec 15, 2024The ability of a robot to plan complex behaviors with real-time computation, rather than adhering to predesigned or offline-learned routines, alleviates the need for specialized algorithms or training for each problem instance. Monte Carlo Tree Search is a powerful planning algorithm that strategically explores simulated future possibilities, but it requires a discrete problem representation that is irreconcilable with the continuous dynamics of the physical world. We present Spectral Expansion Tree Search (SETS), a real-time, tree-based planner that uses the spectrum of the locally linearized system to construct a low-complexity and approximately equivalent discrete representation of the continuous world. We prove SETS converges to a bound of the globally optimal solution for continuous, deterministic and differentiable Markov Decision Processes, a broad class of problems that includes underactuated nonlinear dynamics, non-convex reward functions, and unstructured environments. We experimentally validate SETS on drone, spacecraft, and ground vehicle robots and one numerical experiment, each of which is not directly solvable with existing methods. We successfully show SETS automatically discovers a diverse set of optimal behaviors and motion trajectories in real time.
* The first two authors contributed equally to this article
Motor Imagery Teleoperation of a Mobile Robot Using a Low-Cost Brain-Computer Interface for Multi-Day Validation
Dec 12, 2024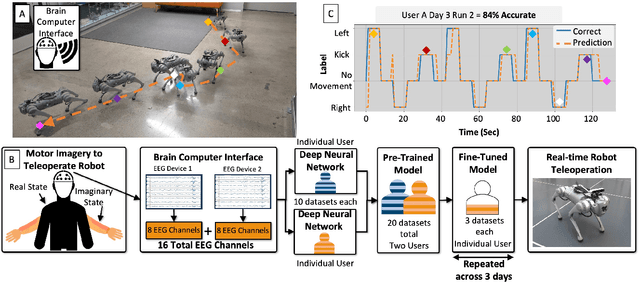
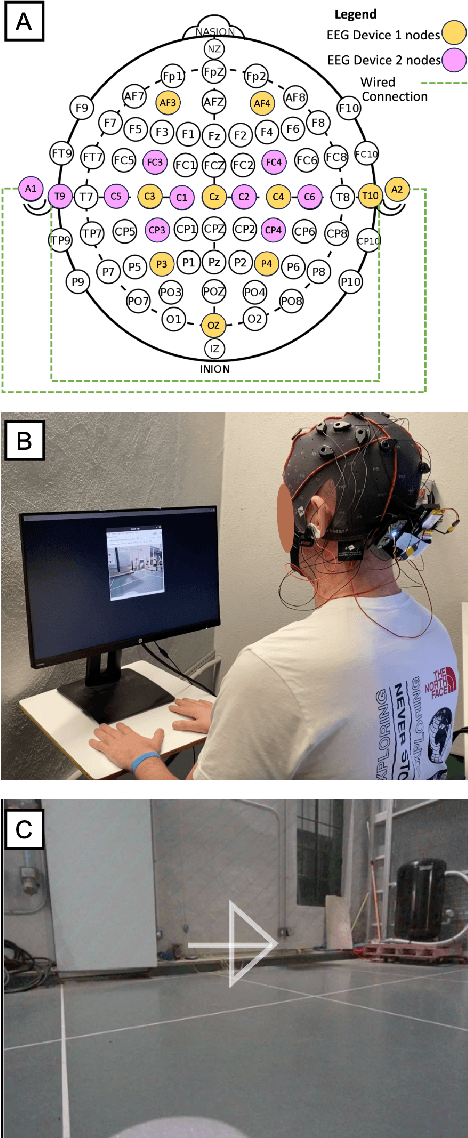
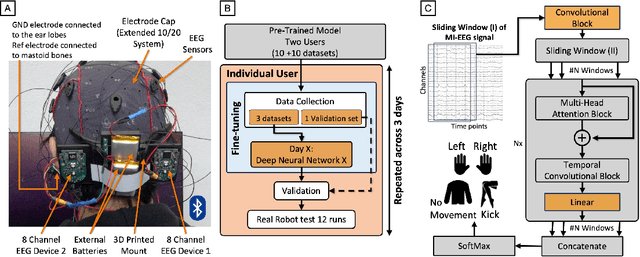
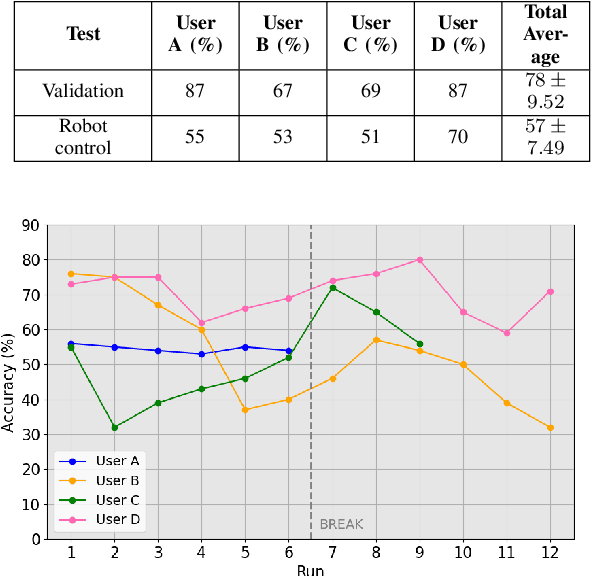
Brain-computer interfaces (BCI) have the potential to provide transformative control in prosthetics, assistive technologies (wheelchairs), robotics, and human-computer interfaces. While Motor Imagery (MI) offers an intuitive approach to BCI control, its practical implementation is often limited by the requirement for expensive devices, extensive training data, and complex algorithms, leading to user fatigue and reduced accessibility. In this paper, we demonstrate that effective MI-BCI control of a mobile robot in real-world settings can be achieved using a fine-tuned Deep Neural Network (DNN) with a sliding window, eliminating the need for complex feature extractions for real-time robot control. The fine-tuning process optimizes the convolutional and attention layers of the DNN to adapt to each user's daily MI data streams, reducing training data by 70% and minimizing user fatigue from extended data collection. Using a low-cost (~$3k), 16-channel, non-invasive, open-source electroencephalogram (EEG) device, four users teleoperated a quadruped robot over three days. The system achieved 78% accuracy on a single-day validation dataset and maintained a 75% validation accuracy over three days without extensive retraining from day-to-day. For real-world robot command classification, we achieved an average of 62% accuracy. By providing empirical evidence that MI-BCI systems can maintain performance over multiple days with reduced training data to DNN and a low-cost EEG device, our work enhances the practicality and accessibility of BCI technology. This advancement makes BCI applications more feasible for real-world scenarios, particularly in controlling robotic systems.
Model Predictive Trees: Sample-Efficient Receding Horizon Planning with Reusable Tree Search
Nov 23, 2024


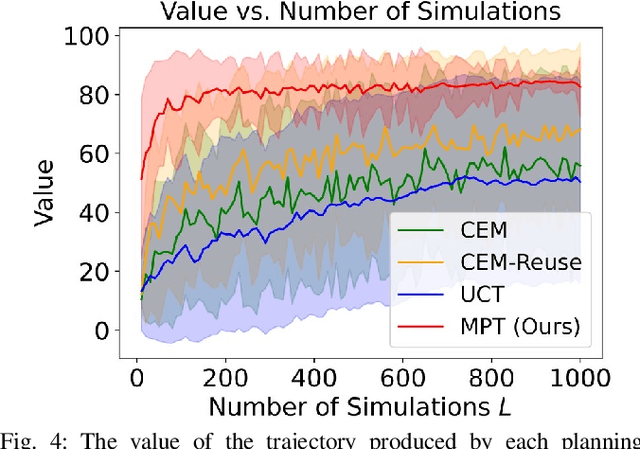
We present Model Predictive Trees (MPT), a receding horizon tree search algorithm that improves its performance by reusing information efficiently. Whereas existing solvers reuse only the highest-quality trajectory from the previous iteration as a "hotstart", our method reuses the entire optimal subtree, enabling the search to be simultaneously guided away from the low-quality areas and towards the high-quality areas. We characterize the restrictions on tree reuse by analyzing the induced tracking error under time-varying dynamics, revealing a tradeoff between the search depth and the timescale of the changing dynamics. In numerical studies, our algorithm outperforms state-of-the-art sampling-based cross-entropy methods with hotstarting. We demonstrate our planner on an autonomous vehicle testbed performing a nonprehensile manipulation task: pushing a target object through an obstacle field. Code associated with this work will be made available at https://github.com/jplathrop/mpt.