 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotor Imagery Teleoperation of a Mobile Robot Using a Low-Cost Brain-Computer Interface for Multi-Day Validation
Paper and Code
Dec 12, 2024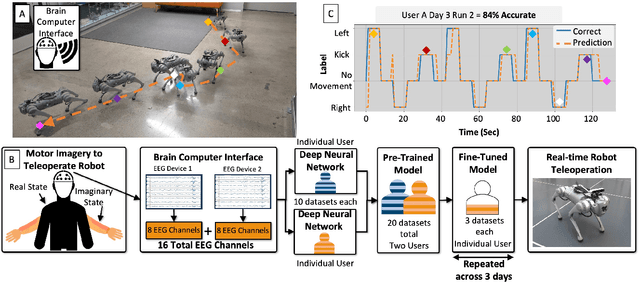
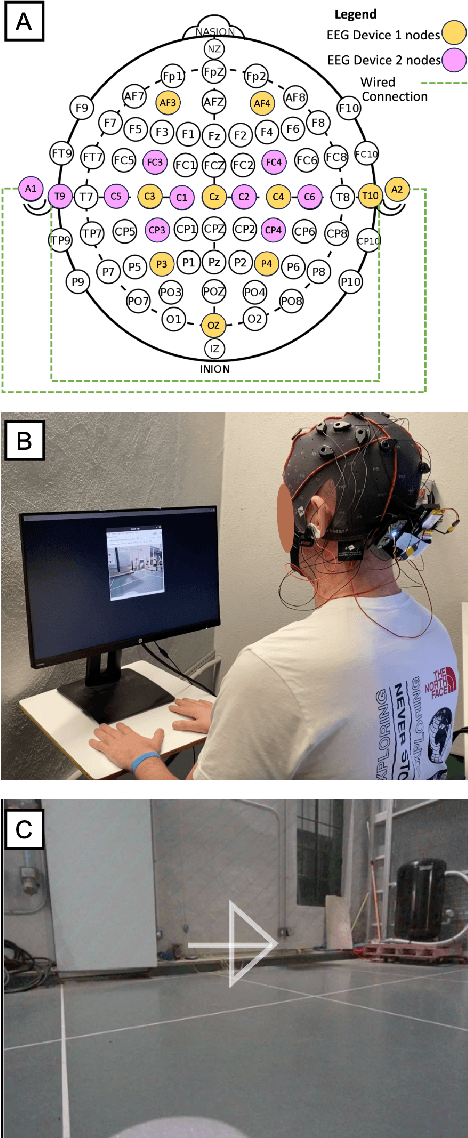
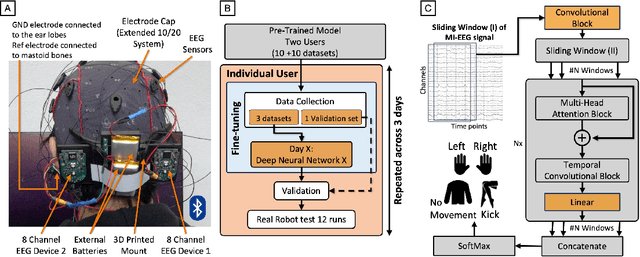
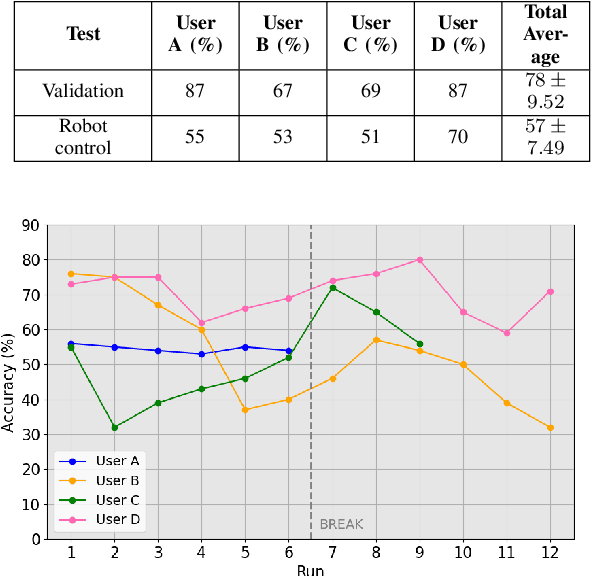
Brain-computer interfaces (BCI) have the potential to provide transformative control in prosthetics, assistive technologies (wheelchairs), robotics, and human-computer interfaces. While Motor Imagery (MI) offers an intuitive approach to BCI control, its practical implementation is often limited by the requirement for expensive devices, extensive training data, and complex algorithms, leading to user fatigue and reduced accessibility. In this paper, we demonstrate that effective MI-BCI control of a mobile robot in real-world settings can be achieved using a fine-tuned Deep Neural Network (DNN) with a sliding window, eliminating the need for complex feature extractions for real-time robot control. The fine-tuning process optimizes the convolutional and attention layers of the DNN to adapt to each user's daily MI data streams, reducing training data by 70% and minimizing user fatigue from extended data collection. Using a low-cost (~$3k), 16-channel, non-invasive, open-source electroencephalogram (EEG) device, four users teleoperated a quadruped robot over three days. The system achieved 78% accuracy on a single-day validation dataset and maintained a 75% validation accuracy over three days without extensive retraining from day-to-day. For real-world robot command classification, we achieved an average of 62% accuracy. By providing empirical evidence that MI-BCI systems can maintain performance over multiple days with reduced training data to DNN and a low-cost EEG device, our work enhances the practicality and accessibility of BCI technology. This advancement makes BCI applications more feasible for real-world scenarios, particularly in controlling robotic systems.