 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Trees: Sample-Efficient Receding Horizon Planning with Reusable Tree Search
Nov 23, 2024


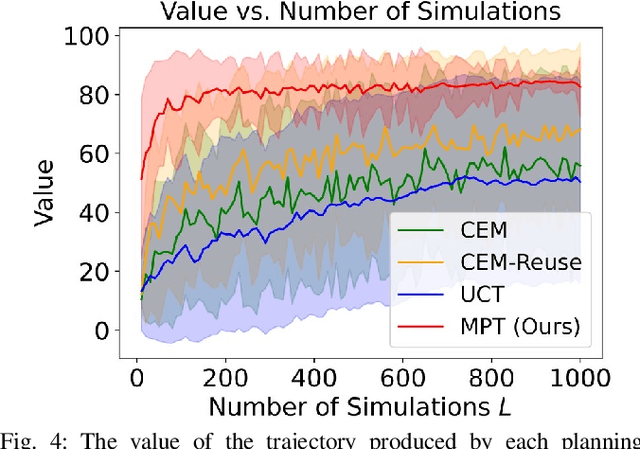
We present Model Predictive Trees (MPT), a receding horizon tree search algorithm that improves its performance by reusing information efficiently. Whereas existing solvers reuse only the highest-quality trajectory from the previous iteration as a "hotstart", our method reuses the entire optimal subtree, enabling the search to be simultaneously guided away from the low-quality areas and towards the high-quality areas. We characterize the restrictions on tree reuse by analyzing the induced tracking error under time-varying dynamics, revealing a tradeoff between the search depth and the timescale of the changing dynamics. In numerical studies, our algorithm outperforms state-of-the-art sampling-based cross-entropy methods with hotstarting. We demonstrate our planner on an autonomous vehicle testbed performing a nonprehensile manipulation task: pushing a target object through an obstacle field. Code associated with this work will be made available at https://github.com/jplathrop/mpt.
MAGIC-VFM: Meta-learning Adaptation for Ground Interaction Control with Visual Foundation Models
Jul 17, 2024Control of off-road vehicles is challenging due to the complex dynamic interactions with the terrain. Accurate modeling of these interactions is important to optimize driving performance, but the relevant physical phenomena are too complex to model from first principles. Therefore, we present an offline meta-learning algorithm to construct a rapidly-tunable model of residual dynamics and disturbances. Our model processes terrain images into features using a visual foundation model (VFM), then maps these features and the vehicle state to an estimate of the current actuation matrix using a deep neural network (DNN). We then combine this model with composite adaptive control to modify the last layer of the DNN in real time, accounting for the remaining terrain interactions not captured during offline training. We provide mathematical guarantees of stability and robustness for our controller and demonstrate the effectiveness of our method through simulations and hardware experiments with a tracked vehicle and a car-like robot. We evaluate our method outdoors on different slopes with varying slippage and actuator degradation disturbances, and compare against an adaptive controller that does not use the VFM terrain features. We show significant improvement over the baseline in both hardware experimentation and simulation.