 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodied Learning of Reward for Musculoskeletal Control with Vision Language Models
Dec 28, 2025Discovering effective reward functions remains a fundamental challenge in motor control of high-dimensional musculoskeletal systems. While humans can describe movement goals explicitly such as "walking forward with an upright posture," the underlying control strategies that realize these goals are largely implicit, making it difficult to directly design rewards from high-level goals and natural language descriptions. We introduce Motion from Vision-Language Representation (MoVLR), a framework that leverages vision-language models (VLMs) to bridge the gap between goal specification and movement control. Rather than relying on handcrafted rewards, MoVLR iteratively explores the reward space through iterative interaction between control optimization and VLM feedback, aligning control policies with physically coordinated behaviors. Our approach transforms language and vision-based assessments into structured guidance for embodied learning, enabling the discovery and refinement of reward functions for high-dimensional musculoskeletal locomotion and manipulation. These results suggest that VLMs can effectively ground abstract motion descriptions in the implicit principles governing physiological motor control.
Safe Bayesian Optimization for the Control of High-Dimensional Embodied Systems
Dec 29, 2024



Learning to move is a primary goal for animals and robots, where ensuring safety is often important when optimizing control policies on the embodied systems. For complex tasks such as the control of human or humanoid control, the high-dimensional parameter space adds complexity to the safe optimization effort. Current safe exploration algorithms exhibit inefficiency and may even become infeasible with large high-dimensional input spaces. Furthermore, existing high-dimensional constrained optimization methods neglect safety in the search process. In this paper, we propose High-dimensional Safe Bayesian Optimization with local optimistic exploration (HdSafeBO), a novel approach designed to handle high-dimensional sampling problems under probabilistic safety constraints. We introduce a local optimistic strategy to efficiently and safely optimize the objective function, providing a probabilistic safety guarantee and a cumulative safety violation bound. Through the use of isometric embedding, HdSafeBO addresses problems ranging from a few hundred to several thousand dimensions while maintaining safety guarantees. To our knowledge, HdSafeBO is the first algorithm capable of optimizing the control of high-dimensional musculoskeletal systems with high safety probability. We also demonstrate the real-world applicability of HdSafeBO through its use in the safe online optimization of neural stimulation induced human motion control.
Scalable Bayesian Optimization via Focalized Sparse Gaussian Processes
Dec 29, 2024Bayesian optimization is an effective technique for black-box optimization, but its applicability is typically limited to low-dimensional and small-budget problems due to the cubic complexity of computing the Gaussian process (GP) surrogate. While various approximate GP models have been employed to scale Bayesian optimization to larger sample sizes, most suffer from overly-smooth estimation and focus primarily on problems that allow for large online samples. In this work, we argue that Bayesian optimization algorithms with sparse GPs can more efficiently allocate their representational power to relevant regions of the search space. To achieve this, we propose focalized GP, which leverages a novel variational loss function to achieve stronger local prediction, as well as FocalBO, which hierarchically optimizes the focalized GP acquisition function over progressively smaller search spaces. Experimental results demonstrate that FocalBO can efficiently leverage large amounts of offline and online data to achieve state-of-the-art performance on robot morphology design and to control a 585-dimensional musculoskeletal system.
Population Transformer: Learning Population-level Representations of Intracranial Activity
Jun 05, 2024



We present a self-supervised framework that learns population-level codes for intracranial neural recordings at scale, unlocking the benefits of representation learning for a key neuroscience recording modality. The Population Transformer (PopT) lowers the amount of data required for decoding experiments, while increasing accuracy, even on never-before-seen subjects and tasks. We address two key challenges in developing PopT: sparse electrode distribution and varying electrode location across patients. PopT stacks on top of pretrained representations and enhances downstream tasks by enabling learned aggregation of multiple spatially-sparse data channels. Beyond decoding, we interpret the pretrained PopT and fine-tuned models to show how it can be used to provide neuroscience insights learned from massive amounts of data. We release a pretrained PopT to enable off-the-shelf improvements in multi-channel intracranial data decoding and interpretability, and code is available at https://github.com/czlwang/PopulationTransformer.
Semantics from Space: Satellite-Guided Thermal Semantic Segmentation Annotation for Aerial Field Robots
Mar 21, 2024We present a new method to automatically generate semantic segmentation annotations for thermal imagery captured from an aerial vehicle by utilizing satellite-derived data products alongside onboard global positioning and attitude estimates. This new capability overcomes the challenge of developing thermal semantic perception algorithms for field robots due to the lack of annotated thermal field datasets and the time and costs of manual annotation, enabling precise and rapid annotation of thermal data from field collection efforts at a massively-parallelizable scale. By incorporating a thermal-conditioned refinement step with visual foundation models, our approach can produce highly-precise semantic segmentation labels using low-resolution satellite land cover data for little-to-no cost. It achieves 98.5% of the performance from using costly high-resolution options and demonstrates between 70-160% improvement over popular zero-shot semantic segmentation methods based on large vision-language models currently used for generating annotations for RGB imagery. Code will be available at: https://github.com/connorlee77/aerial-auto-segment.
GNSS Radio Occultation on Aerial Platforms with Commercial Off-The-Shelf Receivers
Sep 27, 2021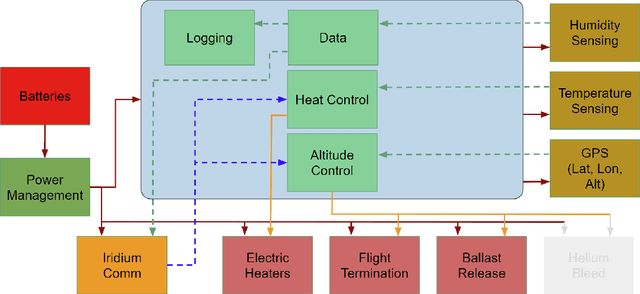

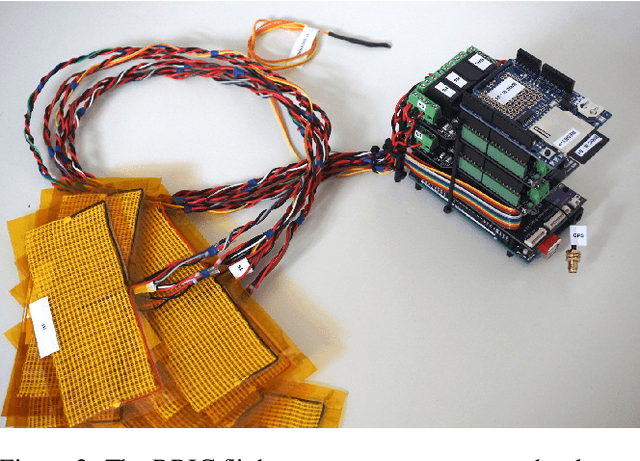
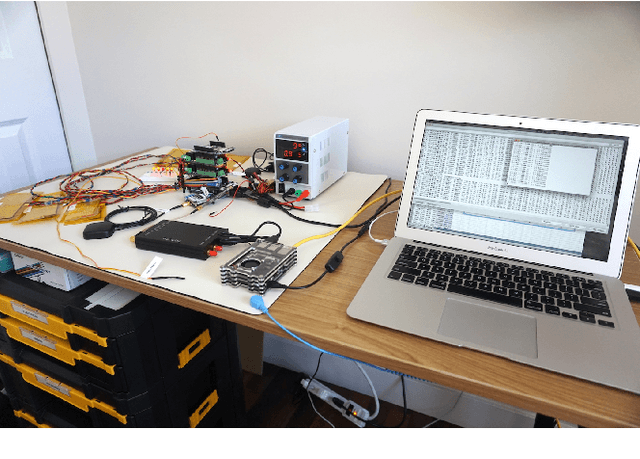
In recent decades, GNSS Radio Occultation soundings have proven an invaluable input to global weather forecasting. The success of government-sponsored programs such as COSMIC is now complemented by commercial low-cost cubesat implementations. The result is access to more than 10,000 soundings per day and improved weather forecasting accuracy. This movement towards commercialization has been supported by several agencies, including the National Aeronautics and Space Administration (NASA), National Oceanic and Atmospheric Administration (NOAA) and the U.S. Air Force (USAF) with programs such as the Commercial Weather Data Pilot (CWDP). This has resulted in further interest in commercially deploying GNSS-RO on complementary platforms. Here, we examine a so far underutilized platform: the high-altitude weather balloon. Such meteorological radiosondes are deployed twice daily at over 900 locations globally and form an essential in-situ data source as a long-standing input to weather forecasting models. Adding GNSS-RO capability to existing radiosonde platforms would greatly expand capability, allowing for persistent and local area monitoring, a feature particularly useful for hurricane and other severe weather monitoring. A prohibitive barrier to entry to this inclusion is cost and complexity as GNSS-RO traditionally requires highly specialized and sensitive equipment. This paper describes a multi-year effort to develop a low-cost and scalable approach to balloon GNSS-RO based on Commercial-Off-The-Shelf (COTS) GNSS receivers. We present hardware prototypes and data processing techniques which demonstrate the technical feasibility of the approach through results from several flight testing campaigns.