 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrio: Learning Time-Series Forecasting with Temporal-Spatial-Sample Attention and Structural Causal Priors
Jun 05, 2026Multivariate time-series forecasting requires models to reason over temporal dynamics, cross-variable dependencies, and historical input-output correspondences. Recent Prior-Data Fitted Networks (PFNs) suggest that synthetic tasks can be useful for learning transferable inference behavior. However, directly transferring this paradigm to time-series forecasting remains difficult, since temporal order, dynamic lags, and recurring historical patterns are not naturally captured by ordinary tabular priors. Motivated by this observation, we propose Trio, a sample-aware time-series forecasting architecture based on Temporal-Spatial-Sample attention. Temporal attention captures within-window dynamics, spatial attention models inter-variable dependencies, and sample attention retrieves relevant historical lookback-future pairs to guide the current prediction. Rather than claiming a fully general PFN-style forecaster, our goal is to study how historical input-output examples can be explicitly organized and reused within a forecasting model. We further introduce a Time-Series Structural Causal Model (TS-SCM) generator to create structured synthetic forecasting tasks with dynamic lags, cross-variable interactions, noise, feedback, and distributional drift. Experiments on synthetic, industrial, and public benchmarks show that the proposed architecture improves forecasting performance. Exploratory zero-shot experiments further suggest that TS-SCM-generated tasks may provide useful structural priors, while fully general PFN-style time-series forecasting remains an open problem.
Nuanced Emotion Recognition Based on a Segment-based MLLM Framework Leveraging Qwen3-Omni for AH Detection
Mar 12, 2026Emotion recognition in videos is a pivotal task in affective computing, where identifying subtle psychological states such as Ambivalence and Hesitancy holds significant value for behavioral intervention and digital health. Ambivalence and Hesitancy states often manifest through cross-modal inconsistencies such as discrepancies between facial expressions, vocal tones, and textual semantics, posing a substantial challenge for automated recognition. This paper proposes a recognition framework that integrates temporal segment modeling with Multimodal Large Language Models. To address computational efficiency and token constraints in long video processing, we employ a segment-based strategy, partitioning videos into short clips with a maximum duration of 5 seconds. We leverage the Qwen3-Omni-30B-A3B model, fine-tuned on the BAH dataset using LoRA and full-parameter strategies via the MS-Swift framework, enabling the model to synergistically analyze visual and auditory signals. Experimental results demonstrate that the proposed method achieves an accuracy of 85.1% on the test set, significantly outperforming existing benchmarks and validating the superior capability of Multimodal Large Language Models in capturing complex and nuanced emotional conflicts. The code is released at https://github.com/dlnn123/A-H-Detection-with-Qwen-Omni.git.
Safe Bayesian Optimization for the Control of High-Dimensional Embodied Systems
Dec 29, 2024



Learning to move is a primary goal for animals and robots, where ensuring safety is often important when optimizing control policies on the embodied systems. For complex tasks such as the control of human or humanoid control, the high-dimensional parameter space adds complexity to the safe optimization effort. Current safe exploration algorithms exhibit inefficiency and may even become infeasible with large high-dimensional input spaces. Furthermore, existing high-dimensional constrained optimization methods neglect safety in the search process. In this paper, we propose High-dimensional Safe Bayesian Optimization with local optimistic exploration (HdSafeBO), a novel approach designed to handle high-dimensional sampling problems under probabilistic safety constraints. We introduce a local optimistic strategy to efficiently and safely optimize the objective function, providing a probabilistic safety guarantee and a cumulative safety violation bound. Through the use of isometric embedding, HdSafeBO addresses problems ranging from a few hundred to several thousand dimensions while maintaining safety guarantees. To our knowledge, HdSafeBO is the first algorithm capable of optimizing the control of high-dimensional musculoskeletal systems with high safety probability. We also demonstrate the real-world applicability of HdSafeBO through its use in the safe online optimization of neural stimulation induced human motion control.
Threatening Patch Attacks on Object Detection in Optical Remote Sensing Images
Feb 13, 2023Advanced Patch Attacks (PAs) on object detection in natural images have pointed out the great safety vulnerability in methods based on deep neural networks. However, little attention has been paid to this topic in Optical Remote Sensing Images (O-RSIs). To this end, we focus on this research, i.e., PAs on object detection in O-RSIs, and propose a more Threatening PA without the scarification of the visual quality, dubbed TPA. Specifically, to address the problem of inconsistency between local and global landscapes in existing patch selection schemes, we propose leveraging the First-Order Difference (FOD) of the objective function before and after masking to select the sub-patches to be attacked. Further, considering the problem of gradient inundation when applying existing coordinate-based loss to PAs directly, we design an IoU-based objective function specific for PAs, dubbed Bounding box Drifting Loss (BDL), which pushes the detected bounding boxes far from the initial ones until there are no intersections between them. Finally, on two widely used benchmarks, i.e., DIOR and DOTA, comprehensive evaluations of our TPA with four typical detectors (Faster R-CNN, FCOS, RetinaNet, and YOLO-v4) witness its remarkable effectiveness. To the best of our knowledge, this is the first attempt to study the PAs on object detection in O-RSIs, and we hope this work can get our readers interested in studying this topic.
Vision-based Navigation of Autonomous Vehicle in Roadway Environments with Unexpected Hazards
Sep 27, 2018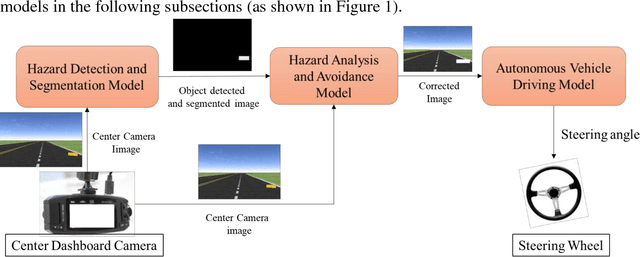

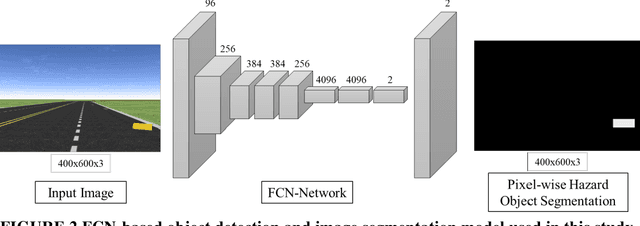

Vision-based navigation of modern autonomous vehicles primarily depends on Deep Neural Network (DNN) based systems in which the controller obtains input from sensors/detectors such as cameras, and produces an output such as a steering wheel angle to navigate the vehicle safely in roadway traffic. Typically, these DNN-based systems are trained through supervised and/or transfer learning; however, recent studies show that these systems can be compromised by perturbation or adversarial input features on the trained DNN-based models. Similarly, this perturbation can be introduced into the autonomous vehicle DNN-based system by roadway hazards such as debris and roadblocks. In this study, we first introduce a roadway hazardous environment (both intentional and unintentional) that can compromise the DNN-based system of an autonomous vehicle, producing an incorrect vehicle navigational output such as a steering wheel angle, which can cause crashes resulting in fatality and injury. Then, we develop an approach based on object detection and semantic segmentation to mitigate the adverse effect of this hazardous environment, one that helps the autonomous vehicle to navigate safely around such hazards. This study finds the DNN-based model with hazardous object detection, and semantic segmentation improves the ability of an autonomous vehicle to avoid potential crashes by 21% compared to the traditional DNN-based autonomous driving system.