 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-based Navigation of Autonomous Vehicle in Roadway Environments with Unexpected Hazards
Sep 27, 2018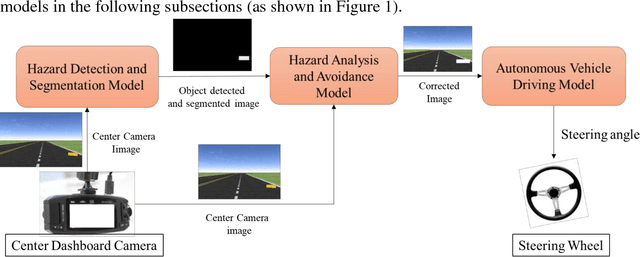

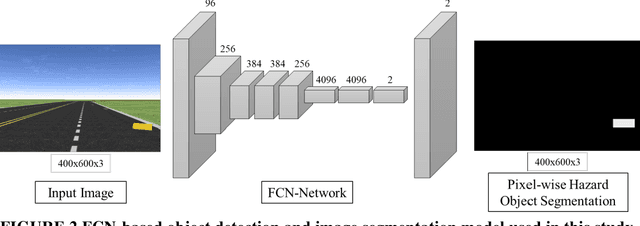

Vision-based navigation of modern autonomous vehicles primarily depends on Deep Neural Network (DNN) based systems in which the controller obtains input from sensors/detectors such as cameras, and produces an output such as a steering wheel angle to navigate the vehicle safely in roadway traffic. Typically, these DNN-based systems are trained through supervised and/or transfer learning; however, recent studies show that these systems can be compromised by perturbation or adversarial input features on the trained DNN-based models. Similarly, this perturbation can be introduced into the autonomous vehicle DNN-based system by roadway hazards such as debris and roadblocks. In this study, we first introduce a roadway hazardous environment (both intentional and unintentional) that can compromise the DNN-based system of an autonomous vehicle, producing an incorrect vehicle navigational output such as a steering wheel angle, which can cause crashes resulting in fatality and injury. Then, we develop an approach based on object detection and semantic segmentation to mitigate the adverse effect of this hazardous environment, one that helps the autonomous vehicle to navigate safely around such hazards. This study finds the DNN-based model with hazardous object detection, and semantic segmentation improves the ability of an autonomous vehicle to avoid potential crashes by 21% compared to the traditional DNN-based autonomous driving system.