 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXona Pulsar Single-Satellite Positioning: System Perspective and Experimental Validation
Feb 06, 2026Xona is deploying Pulsar, a low Earth orbit (LEO) commercial navigation system designed to deliver resilient positioning, navigation, and timing (PNT) where traditional solutions fall short. Pulsar satellites broadcast dedicated signals optimized for commercial users. This brings rapid geometry change, strong Doppler observability, and robust timing, enabling new approaches to positioning even when only one satellite is visible. Internet of Things (IoT) applications often prioritize availability over sub-meter accuracy in urban canyons, semi-indoor spaces, and other constrained environments. Many platforms are battery-powered, have strict size, weight, and power (SWaP) limits, and cannot support complex multi-sensor architectures. Leveraging LEO dynamics and signal strength, Pulsar can maintain navigation capability under these conditions without specialized user hardware. Here we present a single-satellite positioning (SSP) concept that uses available Pulsar measurements to estimate user position and receiver clock states without external aiding. Early in Pulsar deployment, only one or two satellites may be in view, yet this still benefits stationary or near-stationary users, including in semi-indoor and indoor settings. We discuss algorithmic details and system implications: SSP enables positioning with minimal satellite visibility, reduces reliance on dense constellations, and supports integration into resource-constrained platforms. We present simulation and live sky results. High-fidelity constellation simulations configured for Pulsar provide controlled performance assessment. We also present early findings from a Pulsar-enabled receiver using observations from the Pulsar-0 satellite on orbit. Preliminary tests demonstrate meter-level accuracy outdoors and indoors, highlighting potential under varied reception conditions.
Xona Pulsar Compatibility with GNSS
Sep 19, 2025At least ten emerging providers are developing satellite navigation systems for low Earth orbit (LEO). Compatibility with existing GNSS in L-band is critical to their successful deployment and for the larger ecosystem. Xona is deploying Pulsar, a near 260-satellite LEO constellation offering dual L-band navigation services near L1 and L5. Designed for interoperability, Pulsar provides centimeter-level accuracy, resilience, and authentication, while maintaining a format that existing GNSS receivers can support through a firmware update. This study examines Pulsar's compatibility with GPS and Galileo by evaluating C/N0 degradation caused by the introduction of its X1 and X5 signals. Using spectrally compact QPSK modulation, Pulsar minimizes interference despite higher signal power. Theoretical analysis is supported by hardware testing across a range of commercial GNSS receivers in both lab-based simulation and in-orbit live-sky conditions. The study confirms Pulsar causes no adverse interference effects to existing GNSS, supporting coexistence and integration within the global PNT ecosystem.
* 15 pages, 12 figures
Localization & Mapping Requirements for Level 2+ Autonomous Vehicles
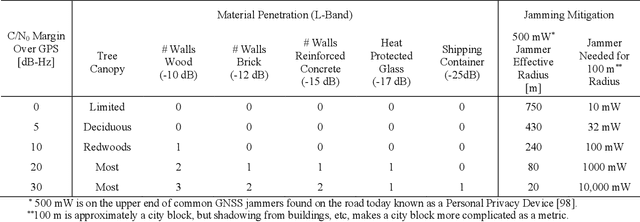
Jan 05, 2023Autonomous vehicles are being deployed with a spectrum of capability, extending from driver assistance features for the highway in personal vehicles (SAE Level 2+) to fully autonomous fleet ride sharing services operating in complex city environments (SAE Level 4+). This spectrum of autonomy often operates in different physical environments with different degrees of assumed driver in-the-loop oversight and hence have very different system and subsystem requirements. At the heart of SAE Level 2 to 5 systems is localization and mapping, which ranges from road determination for feature geofencing or high-level routing, through lane determination for advanced driver assistance, to where-in-lane positioning for full vehicle control. We assess localization and mapping requirements for different levels of autonomy and supported features. This work provides a framework for system decomposition, including the level of redundancy needed to achieve the target level of safety. We examine several representative autonomous and assistance features and make recommendations on positioning requirements as well map georeferencing and information integrity.
GNSS Radio Occultation on Aerial Platforms with Commercial Off-The-Shelf Receivers
Sep 27, 2021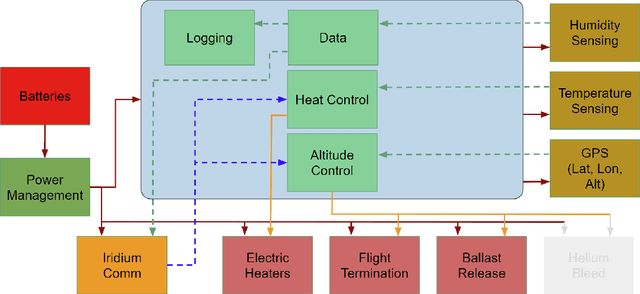

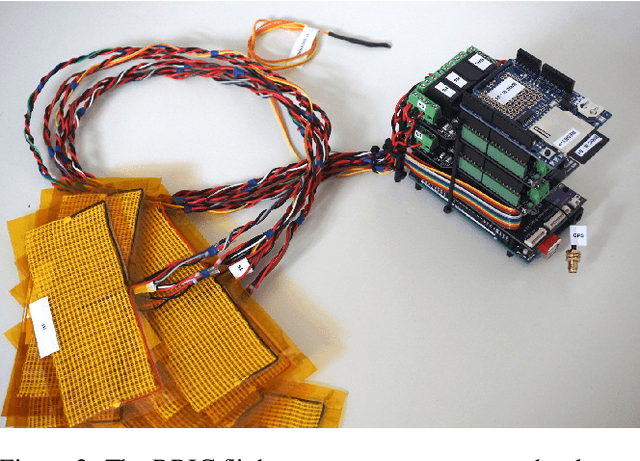
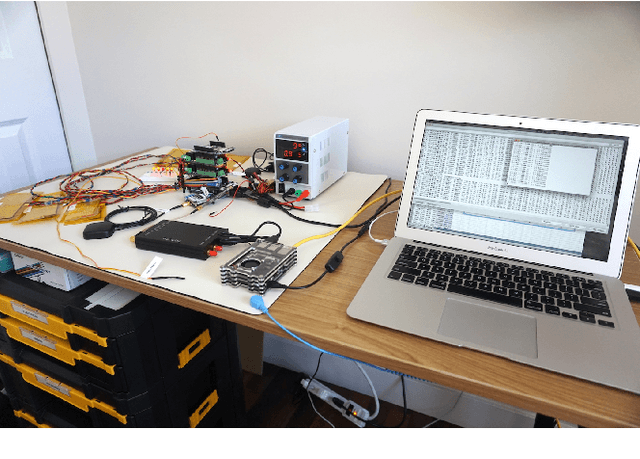
In recent decades, GNSS Radio Occultation soundings have proven an invaluable input to global weather forecasting. The success of government-sponsored programs such as COSMIC is now complemented by commercial low-cost cubesat implementations. The result is access to more than 10,000 soundings per day and improved weather forecasting accuracy. This movement towards commercialization has been supported by several agencies, including the National Aeronautics and Space Administration (NASA), National Oceanic and Atmospheric Administration (NOAA) and the U.S. Air Force (USAF) with programs such as the Commercial Weather Data Pilot (CWDP). This has resulted in further interest in commercially deploying GNSS-RO on complementary platforms. Here, we examine a so far underutilized platform: the high-altitude weather balloon. Such meteorological radiosondes are deployed twice daily at over 900 locations globally and form an essential in-situ data source as a long-standing input to weather forecasting models. Adding GNSS-RO capability to existing radiosonde platforms would greatly expand capability, allowing for persistent and local area monitoring, a feature particularly useful for hurricane and other severe weather monitoring. A prohibitive barrier to entry to this inclusion is cost and complexity as GNSS-RO traditionally requires highly specialized and sensitive equipment. This paper describes a multi-year effort to develop a low-cost and scalable approach to balloon GNSS-RO based on Commercial-Off-The-Shelf (COTS) GNSS receivers. We present hardware prototypes and data processing techniques which demonstrate the technical feasibility of the approach through results from several flight testing campaigns.
Ford Highway Driving RTK Dataset: 30,000 km of North American Highways
Oct 05, 2020

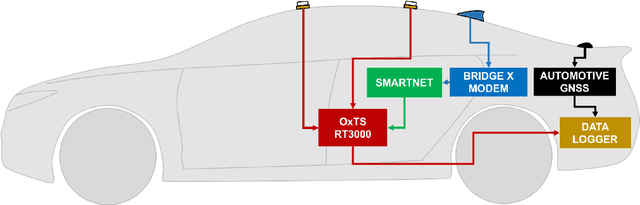
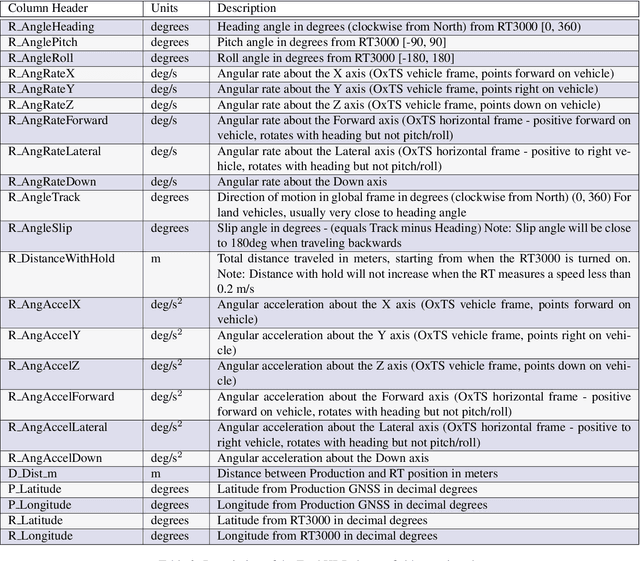
There is a growing need for vehicle positioning information to support Advanced Driver Assistance Systems (ADAS), Connectivity (V2X), and Autonomous Driving (AD) features. These range from a need for road determination ($<$5 meters), lane determination ($<$1.5 meters), and determining where the vehicle is within the lane ($<$0.3 meters). This paper presents the Ford Highway Driving RTK (Ford-HDR) dataset. This dataset includes nearly 30,000 km of data collected primarily on North American highways during a driving campaign designed to validate driver assistance features in 2018. This includes data from a representative automotive production GNSS used primarily for turn-by-turn navigation as well as an Inertial Navigation System (INS) which couples two survey-grade GNSS receivers with a tactical grade Inertial Measurement Unit (IMU) to act as ground truth. The latter utilized networked Real-Time Kinematic (RTK) GNSS corrections delivered over a cellular modem in real-time. This dataset is being released into the public domain to spark further research in the community.
Satellite Navigation for the Age of Autonomy
May 19, 2020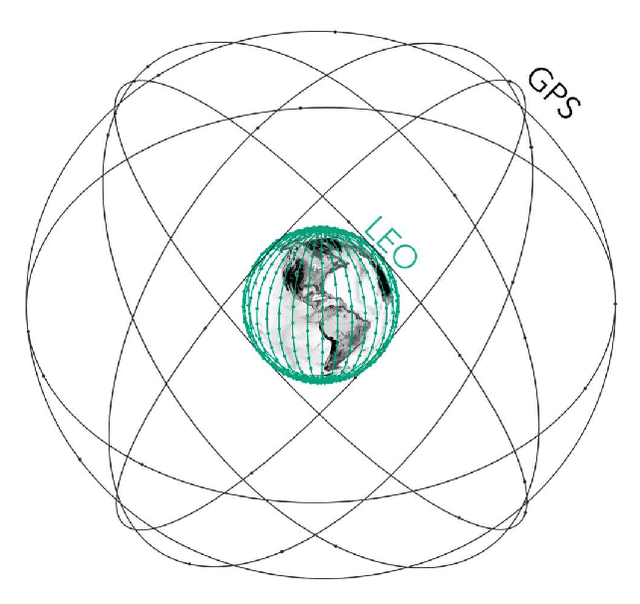
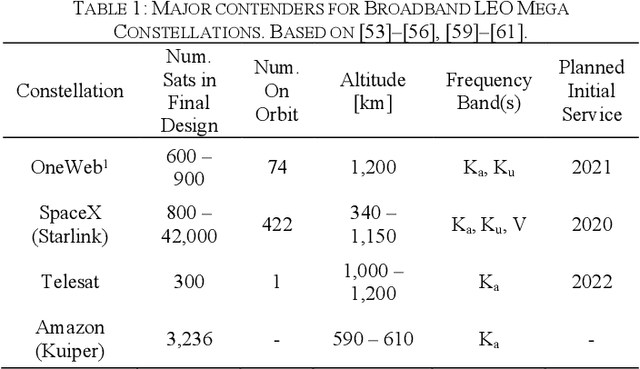
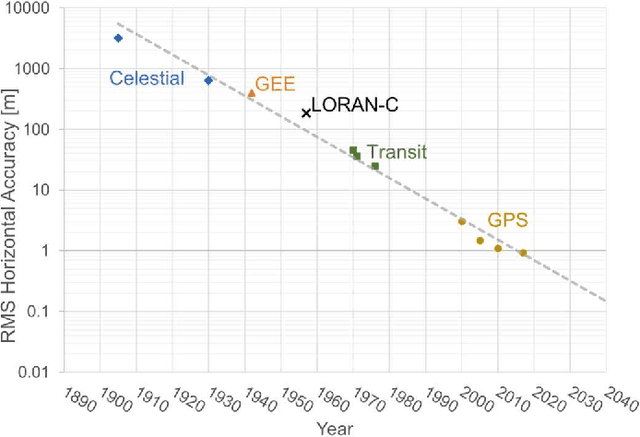
Global Navigation Satellite Systems (GNSS) brought navigation to the masses. Coupled with smartphones, the blue dot in the palm of our hands has forever changed the way we interact with the world. Looking forward, cyber-physical systems such as self-driving cars and aerial mobility are pushing the limits of what localization technologies including GNSS can provide. This autonomous revolution requires a solution that supports safety-critical operation, centimeter positioning, and cyber-security for millions of users. To meet these demands, we propose a navigation service from Low Earth Orbiting (LEO) satellites which deliver precision in-part through faster motion, higher power signals for added robustness to interference, constellation autonomous integrity monitoring for integrity, and encryption / authentication for resistance to spoofing attacks. This paradigm is enabled by the 'New Space' movement, where highly capable satellites and components are now built on assembly lines and launch costs have decreased by more than tenfold. Such a ubiquitous positioning service enables a consistent and secure standard where trustworthy information can be validated and shared, extending the electronic horizon from sensor line of sight to an entire city. This enables the situational awareness needed for true safe operation to support autonomy at scale.
* 11 pages, 8 figures, 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS)
Standalone and RTK GNSS on 30,000 km of North American Highways
Jul 17, 2019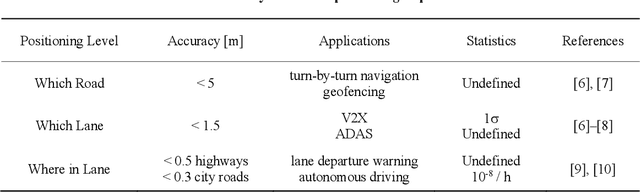


There is a growing need for vehicle positioning information to support Advanced Driver Assistance Systems (ADAS), Connectivity (V2X), and Automated Driving (AD) features. These range from a need for road determination (<5 meters), lane determination (<1.5 meters), and determining where the vehicle is within the lane (<0.3 meters). This work examines the performance of Global Navigation Satellite Systems (GNSS) on 30,000 km of North American highways to better understand the automotive positioning needs it meets today and what might be possible in the near future with wide area GNSS correction services and multi-frequency receivers. This includes data from a representative automotive production GNSS used primarily for turn-by-turn navigation as well as an Inertial Navigation System which couples two survey grade GNSS receivers with a tactical grade Inertial Measurement Unit (IMU) to act as ground truth. The latter utilized networked Real-Time Kinematic (RTK) GNSS corrections delivered over a cellular modem in real-time. We assess on-road GNSS accuracy, availability, and continuity. Availability and continuity are broken down in terms of satellite visibility, satellite geometry, position type (RTK fixed, RTK float, or standard positioning), and RTK correction latency over the network. Results show that current automotive solutions are best suited to meet road determination requirements at 98% availability but are less suitable for lane determination at 57%. Multi-frequency receivers with RTK corrections were found more capable with road determination at 99.5%, lane determination at 98%, and highway-level lane departure protection at 91%.
Localization Requirements for Autonomous Vehicles
Jun 03, 2019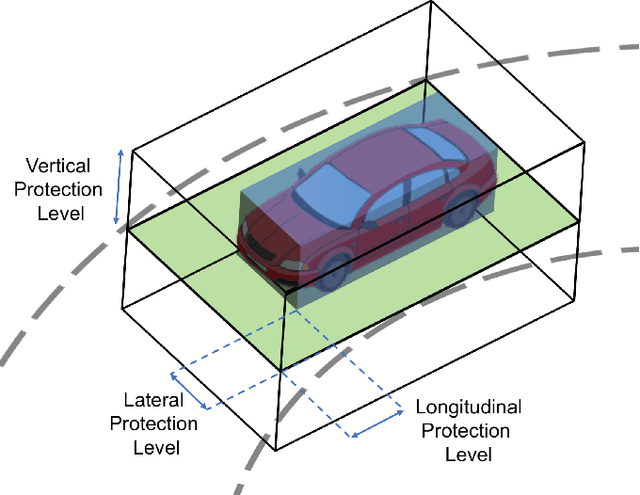

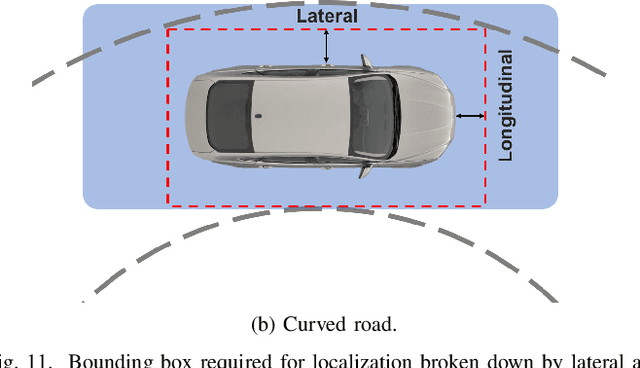
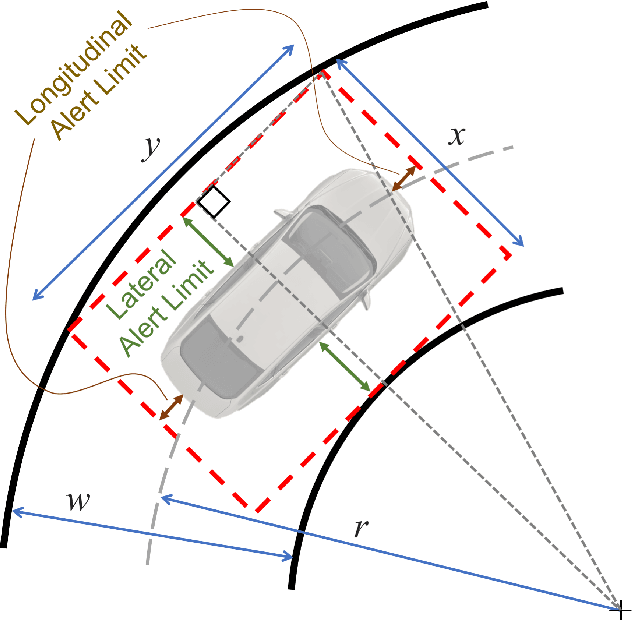
Autonomous vehicles require precise knowledge of their position and orientation in all weather and traffic conditions for path planning, perception, control, and general safe operation. Here we derive these requirements for autonomous vehicles based on first principles. We begin with the safety integrity level, defining the allowable probability of failure per hour of operation based on desired improvements on road safety today. This draws comparisons with the localization integrity levels required in aviation and rail where similar numbers are derived at 10^-8 probability of failure per hour of operation. We then define the geometry of the problem, where the aim is to maintain knowledge that the vehicle is within its lane and to determine what road level it is on. Longitudinal, lateral, and vertical localization error bounds (alert limits) and 95% accuracy requirements are derived based on US road geometry standards (lane width, curvature, and vertical clearance) and allowable vehicle dimensions. For passenger vehicles operating on freeway roads, the result is a required lateral error bound of 0.57 m (0.20 m, 95%), a longitudinal bound of 1.40 m (0.48 m, 95%), a vertical bound of 1.30 m (0.43 m, 95%), and an attitude bound in each direction of 1.50 deg (0.51 deg, 95%). On local streets, the road geometry makes requirements more stringent where lateral and longitudinal error bounds of 0.29 m (0.10 m, 95%) are needed with an orientation requirement of 0.50 deg (0.17 deg, 95%).