 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFord Highway Driving RTK Dataset: 30,000 km of North American Highways
Paper and Code
Oct 05, 2020

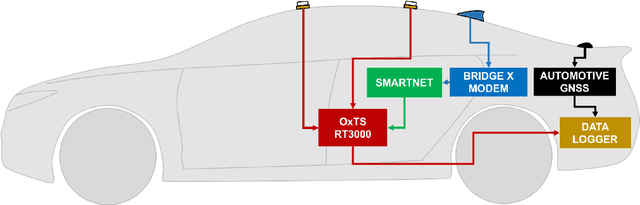
There is a growing need for vehicle positioning information to support Advanced Driver Assistance Systems (ADAS), Connectivity (V2X), and Autonomous Driving (AD) features. These range from a need for road determination ($<$5 meters), lane determination ($<$1.5 meters), and determining where the vehicle is within the lane ($<$0.3 meters). This paper presents the Ford Highway Driving RTK (Ford-HDR) dataset. This dataset includes nearly 30,000 km of data collected primarily on North American highways during a driving campaign designed to validate driver assistance features in 2018. This includes data from a representative automotive production GNSS used primarily for turn-by-turn navigation as well as an Inertial Navigation System (INS) which couples two survey-grade GNSS receivers with a tactical grade Inertial Measurement Unit (IMU) to act as ground truth. The latter utilized networked Real-Time Kinematic (RTK) GNSS corrections delivered over a cellular modem in real-time. This dataset is being released into the public domain to spark further research in the community.