 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeValidation of Space Robotics in Underwater Environments via Disturbance Robustness Equivalency
Feb 28, 2026We present an experimental validation framework for space robotics that leverages underwater environments to approximate microgravity dynamics. While neutral buoyancy conditions make underwater robotics an excellent platform for space robotics validation, there are still dynamical and environmental differences that need to be overcome. Given a high-level space mission specification, expressed in terms of a Signal Temporal Logic specification, we overcome these differences via the notion of maximal disturbance robustness of the mission. We formulate the motion planning problem such that the original space mission and the validation mission achieve the same disturbance robustness degree. The validation platform then executes its mission plan using a near-identical control strategy to the space mission where the closed-loop controller considers the spacecraft dynamics. Evaluating our validation framework relies on estimating disturbances during execution and comparing them to the disturbance robustness degree, providing practical evidence of operation in the space environment. Our evaluation features a dual-experiment setup: an underwater robot operating under near-neutral buoyancy conditions to validate the planning and control strategy of either an experimental planar spacecraft platform or a CubeSat in a high-fidelity space dynamics simulator.
Marinarium: a New Arena to Bring Maritime Robotics Closer to Shore
Feb 26, 2026This paper presents the Marinarium, a modular and stand-alone underwater research facility designed to provide a realistic testbed for maritime and space-analog robotic experimentation in a resource-efficient manner. The Marinarium combines a fully instrumented underwater and aerial operational volume, extendable via a retractable roof for real-weather conditions, a digital twin in the SMaRCSim simulator and tight integration with a space robotics laboratory. All of these result from design choices aimed at bridging simulation, laboratory validation, and field conditions. We compare the Marinarium to similar existing infrastructures and illustrate how its design enables a set of experiments in four open research areas within field robotics. First, we exploit high-fidelity dynamics data from the tank to demonstrate the potential of learning-based system identification approaches applied to underwater vehicles. We further highlight the versatility of the multi-domain operating volume via a rendezvous mission with a heterogeneous fleet of robots across underwater, surface, and air. We then illustrate how the presented digital twin can be utilized to reduce the reality gap in underwater simulation. Finally, we demonstrate the potential of underwater surrogates for spacecraft navigation validation by executing spatiotemporally identical inspection tasks on a planar space-robot emulator and a neutrally buoyant \gls{rov}. In this work, by sharing the insights obtained and rationale behind the design and construction of the Marinarium, we hope to provide the field robotics research community with a blueprint for bridging the gap between controlled and real offshore and space robotics experimentation.
Towards Open-Source and Modular Space Systems with ATMOS
Jan 28, 2025



In the near future, autonomous space systems will compose a large number of the spacecraft being deployed. Their tasks will involve autonomous rendezvous and proximity operations with large structures, such as inspections or assembly of orbiting space stations and maintenance and human-assistance tasks over shared workspaces. To promote replicable and reliable scientific results for autonomous control of spacecraft, we present the design of a space systems laboratory based on open-source and modular software and hardware. The simulation software provides a software-in-the-loop (SITL) architecture that seamlessly transfers simulated results to the ATMOS platforms, developed for testing of multi-agent autonomy schemes for microgravity. The manuscript presents the KTH space systems laboratory facilities and the ATMOS platform as open-source hardware and software contributions. Preliminary results showcase SITL and real testing.
Space CoBot: modular design of an holonomic aerial robot for indoor microgravity environments
Apr 29, 2016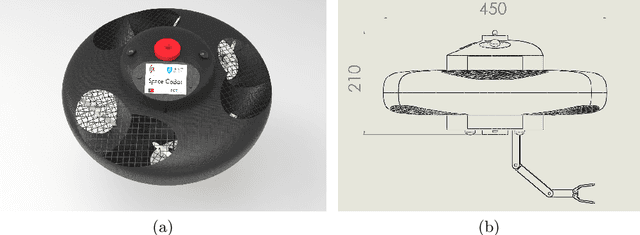

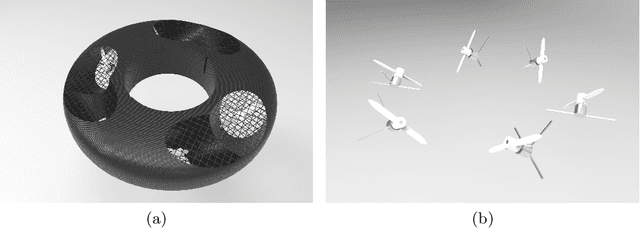

This paper presents the design of a small aerial robot for inhabited microgravity environments, such as orbiting space stations (e.g., ISS). In particular, we target a fleet of robots, called Space CoBots, for collaborative tasks with humans, such as telepresence and cooperative mobile manipulation. The design is modular, comprising an hexrotor based propulsion system, and a stack of modules including batteries, cameras for navigation, a screen for telepresence, a robotic arm, space for extension modules, and a pair of docking ports. These ports can be used for docking and for mechanically attaching two Space CoBots together. The kinematics is holonomic, and thus the translational and the rotational components can be fully decoupled. We employ a multi-criteria optimization approach to determine the best geometric configuration for maximum thrust and torque across all directions. We also tackle the problem of motion control: we use separate converging controllers for position and attitude control. Finally, we present simulation results using a realistic physics simulator. These experiments include a sensitivity evaluation to sensor noise and to unmodeled dynamics, namely a load transportation.
Space CoBot: a collaborative aerial robot for indoor microgravity environments
Apr 21, 2016This paper presents a first contribution to the design of a small aerial robot for inhabited microgravity environments, such as orbiting space stations. In particular, we target a fleet of robots for collaborative tasks with humans, such as telepresence and cooperative mobile manipulation. We explore a propeller based propulsion system, arranged in such a way that the translational and the rotational components can be decoupled, resulting in an holonomic hexarotor. Since propellers have limited thrust, we employ an optimization approach to select the geometric configuration given a criteria of uniform maximum thrust across all directions in the body reference frame. We also tackle the problem of motion control: due to the decoupling of translational and rotational modes we use separate converging controllers for each one of these modes. In addition, we present preliminary simulation results in a realistic simulator, in closed loop with the proposed controller, thus providing a first validation of the followed methodology.