 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausal-Audit: A Framework for Risk Assessment of Assumption Violations in Time-Series Causal Discovery
Apr 02, 2026Time-series causal discovery methods rely on assumptions such as stationarity, regular sampling, and bounded temporal dependence. When these assumptions are violated, structure learning can produce confident but misleading causal graphs without warning. We introduce Causal-Audit, a framework that formalizes assumption validation as calibrated risk assessment. The framework computes effect-size diagnostics across five assumption families (stationarity, irregularity, persistence, nonlinearity, and confounding proxies), aggregates them into four calibrated risk scores with uncertainty intervals, and applies an abstention-aware decision policy that recommends methods (e.g., PCMCI+, VAR-based Granger causality) only when evidence supports reliable inference. The semi-automatic diagnostic stage can also be used independently for structured assumption auditing in individual studies. Evaluation on a synthetic atlas of 500 data-generating processes (DGPs) spanning 10 violation families demonstrates well-calibrated risk scores (AUROC > 0.95), a 62% false positive reduction among recommended datasets, and 78% abstention on severe-violation cases. On 21 external evaluations from TimeGraph (18 categories) and CausalTime (3 domains), recommend-or-abstain decisions are consistent with benchmark specifications in all cases. An open-source implementation of our framework is available.
Robust Cooperative Localization in Featureless Environments: A Comparative Study of DCL, StCL, CCL, CI, and Standard-CL
Mar 12, 2026Cooperative localization (CL) enables accurate position estimation in multi-robot systems operating in GPS-denied environments. This paper presents a comparative study of five CL approaches: Centralized Cooperative Localization (CCL), Decentralized Cooperative Localization (DCL), Sequential Cooperative Localization (StCL), Covariance Intersection (CI), and Standard Cooperative Localization (Standard-CL). All methods are implemented in ROS and evaluated through Monte Carlo simulations under two conditions: weak data association and robust detection. Our analysis reveals fundamental trade-offs among the methods. StCL and Standard-CL achieve the lowest position errors but exhibit severe filter inconsistency, making them unsuitable for safety-critical applications. DCL demonstrates remarkable stability under challenging conditions due to its measurement stride mechanism, which provides implicit regularization against outliers. CI emerges as the most balanced approach, achieving near-optimal consistency while maintaining competitive accuracy. CCL provides theoretically optimal estimation but shows sensitivity to measurement outliers. These findings offer practical guidance for selecting CL algorithms based on application requirements.
Unsupervised LiDAR-Based Multi-UAV Detection and Tracking Under Extreme Sparsity
Mar 12, 2026Non-repetitive solid-state LiDAR scanning leads to an extremely sparse measurement regime for detecting airborne UAVs: a small quadrotor at 10-25 m typically produces only 1-2 returns per scan, which is far below the point densities assumed by most existing detection approaches and inadequate for robust multi-target data association. We introduce an unsupervised, LiDAR-only pipeline that addresses both detection and tracking without the need for labeled training data. The detector integrates range-adaptive DBSCAN clustering with a three-stage temporal consistency check and is benchmarked on real-world air-to-air flight data under eight different parameter configurations. The best setup attains 0.891 precision, 0.804 recall, and 0.63 m RMSE, and a systematic minPts sweep verifies that most scans contain at most 1-2 target points, directly quantifying the sparsity regime. For multi-target tracking, we compare deterministic Hungarian assignment with joint probabilistic data association (JPDA), each coupled with Interacting Multiple Model filtering, in four simulated scenarios with increasing levels of ambiguity. JPDA cuts identity switches by 64% with negligible impact on MOTA, demonstrating that probabilistic association is advantageous when UAV trajectories approach one another closely. A two-environment evaluation strategy, combining real-world detection with RTK-GPS ground truth and simulation-based tracking with identity-annotated ground truth, overcomes the limitations of GNSS-only evaluation at inter-UAV distances below 2 m.
Distributed Kalman--Consensus Filtering with Adaptive Uncertainty Weighting for Multi-Object Tracking in Mobile Robot Networks
Mar 11, 2026This paper presents an implementation and evaluation of a Distributed Kalman--Consensus Filter (DKCF) for Multi-Object Tracking (MOT) in mobile robot networks operating under partial observability and heterogeneous localization uncertainty. A key challenge in such systems is the fusion of information from agents with differing localization quality, where frame misalignment can lead to inconsistent estimates, track duplication, and ghost tracks. To address this issue, we build upon the MOTLEE framework and retain its frame-alignment methodology, which uses consistently tracked dynamic objects as transient landmarks to improve relative pose estimates between robots. On top of this framework, we propose an uncertainty-aware adaptive consensus weighting mechanism that dynamically adjusts the influence of neighbor information based on the covariance of the transmitted estimates, thereby reducing the impact of unreliable data during distributed fusion. Local tracking is performed using a Kalman Filter (KF) with a Constant Velocity Model (CVM) and Global Nearest Neighbor (GNN) data association. simulation results demonstrate that adaptive weighting effectively protects local estimates from inconsistent data, yielding a MOTA improvement of 0.09 for agents suffering from localization drift, although system performance remains constrained by communication latency.
Lightweight 3D LiDAR-Based UAV Tracking: An Adaptive Extended Kalman Filtering Approach
Mar 10, 2026Accurate relative positioning is crucial for swarm aerial robotics, enabling coordinated flight and collision avoidance. Although vision-based tracking has been extensively studied, 3D LiDAR-based methods remain underutilized despite their robustness under varying lighting conditions. Existing systems often rely on bulky, power-intensive sensors, making them impractical for small UAVs with strict payload and energy constraints. This paper presents a lightweight LiDAR-based UAV tracking system incorporating an Adaptive Extended Kalman Filter (AEKF) framework. Our approach effectively addresses the challenges posed by sparse, noisy, and nonuniform point cloud data generated by non-repetitive scanning 3D LiDARs, ensuring reliable tracking while remaining suitable for small drones with strict payload constraints. Unlike conventional filtering techniques, the proposed method dynamically adjusts the noise covariance matrices using innovation and residual statistics, thereby enhancing tracking accuracy under real-world conditions. Additionally, a recovery mechanism ensures continuity of tracking during temporary detection failures caused by scattered LiDAR returns or occlusions. Experimental validation was performed using a Livox Mid-360 LiDAR mounted on a DJI F550 UAV in real-world flight scenarios. The proposed method demonstrated robust UAV tracking performance under sparse LiDAR returns and intermittent detections, consistently outperforming both standard Kalman filtering and particle filtering approaches during aggressive maneuvers. These results confirm that the framework enables reliable relative positioning in GPS-denied environments without the need for multi-sensor arrays or external infrastructure.
Conditional Denoising Model as a Physical Surrogate Model
Jan 28, 2026Surrogate modeling for complex physical systems typically faces a trade-off between data-fitting accuracy and physical consistency. Physics-consistent approaches typically treat physical laws as soft constraints within the loss function, a strategy that frequently fails to guarantee strict adherence to the governing equations, or rely on post-processing corrections that do not intrinsically learn the underlying solution geometry. To address these limitations, we introduce the {Conditional Denoising Model (CDM)}, a generative model designed to learn the geometry of the physical manifold itself. By training the network to restore clean states from noisy ones, the model learns a vector field that points continuously towards the valid solution subspace. We introduce a time-independent formulation that transforms inference into a deterministic fixed-point iteration, effectively projecting noisy approximations onto the equilibrium manifold. Validated on a low-temperature plasma physics and chemistry benchmark, the CDM achieves higher parameter and data efficiency than physics-consistent baselines. Crucially, we demonstrate that the denoising objective acts as a powerful implicit regularizer: despite never seeing the governing equations during training, the model adheres to physical constraints more strictly than baselines trained with explicit physics losses.
FLORA: Efficient Synthetic Data Generation for Object Detection in Low-Data Regimes via finetuning Flux LoRA
Aug 29, 2025

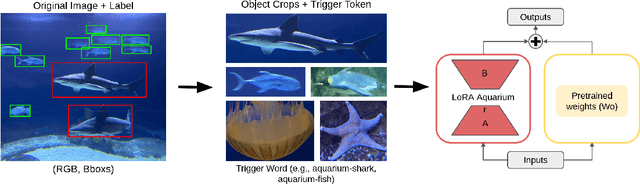

Recent advances in diffusion-based generative models have demonstrated significant potential in augmenting scarce datasets for object detection tasks. Nevertheless, most recent models rely on resource-intensive full fine-tuning of large-scale diffusion models, requiring enterprise-grade GPUs (e.g., NVIDIA V100) and thousands of synthetic images. To address these limitations, we propose Flux LoRA Augmentation (FLORA), a lightweight synthetic data generation pipeline. Our approach uses the Flux 1.1 Dev diffusion model, fine-tuned exclusively through Low-Rank Adaptation (LoRA). This dramatically reduces computational requirements, enabling synthetic dataset generation with a consumer-grade GPU (e.g., NVIDIA RTX 4090). We empirically evaluate our approach on seven diverse object detection datasets. Our results demonstrate that training object detectors with just 500 synthetic images generated by our approach yields superior detection performance compared to models trained on 5000 synthetic images from the ODGEN baseline, achieving improvements of up to 21.3% in mAP@.50:.95. This work demonstrates that it is possible to surpass state-of-the-art performance with far greater efficiency, as FLORA achieves superior results using only 10% of the data and a fraction of the computational cost. This work demonstrates that a quality and efficiency-focused approach is more effective than brute-force generation, making advanced synthetic data creation more practical and accessible for real-world scenarios.
CAD2DMD-SET: Synthetic Generation Tool of Digital Measurement Device CAD Model Datasets for fine-tuning Large Vision-Language Models
Aug 29, 2025



Recent advancements in Large Vision-Language Models (LVLMs) have demonstrated impressive capabilities across various multimodal tasks. They continue, however, to struggle with trivial scenarios such as reading values from Digital Measurement Devices (DMDs), particularly in real-world conditions involving clutter, occlusions, extreme viewpoints, and motion blur; common in head-mounted cameras and Augmented Reality (AR) applications. Motivated by these limitations, this work introduces CAD2DMD-SET, a synthetic data generation tool designed to support visual question answering (VQA) tasks involving DMDs. By leveraging 3D CAD models, advanced rendering, and high-fidelity image composition, our tool produces diverse, VQA-labelled synthetic DMD datasets suitable for fine-tuning LVLMs. Additionally, we present DMDBench, a curated validation set of 1,000 annotated real-world images designed to evaluate model performance under practical constraints. Benchmarking three state-of-the-art LVLMs using Average Normalised Levenshtein Similarity (ANLS) and further fine-tuning LoRA's of these models with CAD2DMD-SET's generated dataset yielded substantial improvements, with InternVL showcasing a score increase of 200% without degrading on other tasks. This demonstrates that the CAD2DMD-SET training dataset substantially improves the robustness and performance of LVLMs when operating under the previously stated challenging conditions. The CAD2DMD-SET tool is expected to be released as open-source once the final version of this manuscript is prepared, allowing the community to add different measurement devices and generate their own datasets.
Multitask Reinforcement Learning for Quadcopter Attitude Stabilization and Tracking using Graph Policy
Mar 11, 2025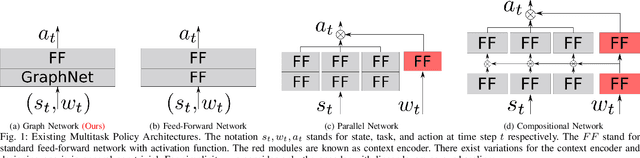
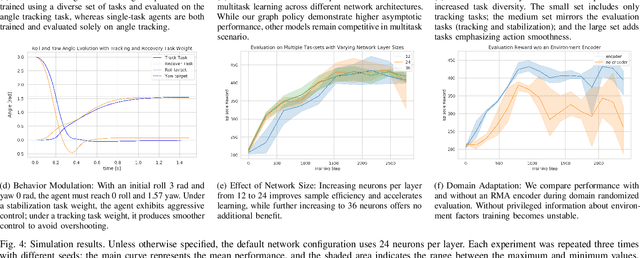
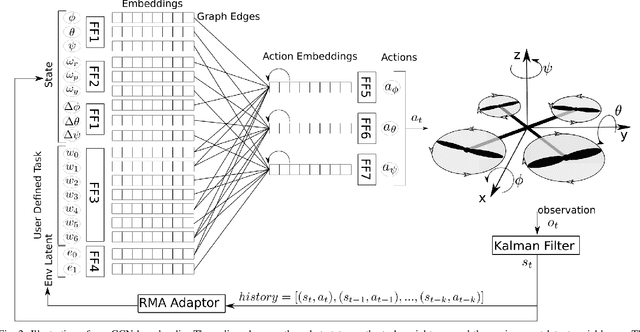
Quadcopter attitude control involves two tasks: smooth attitude tracking and aggressive stabilization from arbitrary states. Although both can be formulated as tracking problems, their distinct state spaces and control strategies complicate a unified reward function. We propose a multitask deep reinforcement learning framework that leverages parallel simulation with IsaacGym and a Graph Convolutional Network (GCN) policy to address both tasks effectively. Our multitask Soft Actor-Critic (SAC) approach achieves faster, more reliable learning and higher sample efficiency than single-task methods. We validate its real-world applicability by deploying the learned policy - a compact two-layer network with 24 neurons per layer - on a Pixhawk flight controller, achieving 400 Hz control without extra computational resources. We provide our code at https://github.com/robot-perception-group/GraphMTSAC\_UAV/.
AI-Powered Augmented Reality for Satellite Assembly, Integration and Test
Sep 26, 2024



The integration of Artificial Intelligence (AI) and Augmented Reality (AR) is set to transform satellite Assembly, Integration, and Testing (AIT) processes by enhancing precision, minimizing human error, and improving operational efficiency in cleanroom environments. This paper presents a technical description of the European Space Agency's (ESA) project "AI for AR in Satellite AIT," which combines real-time computer vision and AR systems to assist technicians during satellite assembly. Leveraging Microsoft HoloLens 2 as the AR interface, the system delivers context-aware instructions and real-time feedback, tackling the complexities of object recognition and 6D pose estimation in AIT workflows. All AI models demonstrated over 70% accuracy, with the detection model exceeding 95% accuracy, indicating a high level of performance and reliability. A key contribution of this work lies in the effective use of synthetic data for training AI models in AR applications, addressing the significant challenges of obtaining real-world datasets in highly dynamic satellite environments, as well as the creation of the Segmented Anything Model for Automatic Labelling (SAMAL), which facilitates the automatic annotation of real data, achieving speeds up to 20 times faster than manual human annotation. The findings demonstrate the efficacy of AI-driven AR systems in automating critical satellite assembly tasks, setting a foundation for future innovations in the space industry.